
Безредукторные приводы для лифтов

С 90-х годов прошлого века в мире, а затем и в России все большее применение находят безредукторные лифтовые механизмы. Смысл состоит в отказе от громоздкого редуктора и перемещение кабины лифта только за счет вращения шкива, наглухо посаженного на вал двигателя. Изменение скорости вращения происходит за счет применения частотного преобразователя, точность движения и остановки обеспечивается энкодером и различными датчиками.
В России в качестве безредукторных лебедок наиболее часто используются асинхронные двигатели. Это тихоходные двигатели (60-200 об/мин) с большим крутящим моментом (от 200 Нм). Система преобразования частоты с обратной связью по положению и скорости, а так же контроль веса кабины приводит к плавному ходу и точной остановке.
Широкое применение асинхронных двигателей объясняется их достоинствами по сравнению с другими типами электродвигателей: конструктивной простотой и, как следствие, высокой надёжностью и невысокой стоимостью.
Практика показывает, что они надежно работают и экономически оправданы в лифтах большой грузоподъемности (от 1500 кг) и в высотных зданиях. К недостаткам их использования можно отнести ошибки при возврате системы управления в состояние равновесия после воздействия обратной связи и стабильность работы модели управления двигателем при низких оборотах. Это создает определенные сложности при настройках частотных преобразователей и комфорте лифта в целом. Специалисты пытаются решить эту проблему путем совершенствования алгоритма и математической модели управления двигателем в частотном преобразовании.
Другое направление в развитии электропривода — использование синхронных двигателей с постоянными магнитами (СДПМ или в английской аббревиатуре SMPM). Эти двигатели способны развивать достаточный момент на валу на низких оборотах и даже в режиме остановки.
Такие двигатели начали производиться за пределами РФ. Наряду с американскими и европейскими активно продвигаются электродвигатели из Китая. Принцип действия синхронного двигателя в том, что магнитное поле катушек ротора, создаваемое при помощи постоянных магнитов, сцеплено с вихревым полем обмоток статора, в отличие от АД, где вращательный момент на короткозамкнутый ротор типа «беличье колесо» передается за счет того, что вихревое поле обмоток статора опережает поле ротора, создавая «скольжение».
В РФ производство лифтовых лебедок с синхронными двигателями налажено в компании«Европейские подъёмные машины».

Лебедка лифтовая типа ЛЛ. Конструкция представляет собой неподвижно закрепленный статор, вокруг которого вращается ротор с постоянными магнитами и наглухо закрепленным к нему КВШ. Ротор в то же время является тормозным барабаном.
Габариты лебедки ЛЛ 01001 грузоподъемностью до 1000 кг ширина 670 мм, высота 748 мм, глубина меньше 400 мм. Монтируются лифтовые лебедки такого типа непосредственно в шахте лифта и не требует отдельного помещения.
Институт «НИПТИЭМ», входящий в электротехнический концерн «РУСЭЛПРОМ» разработал и производит семейство лебедок КИАТ-ЛПП с использованием синхронного малооборотного двигателя так же своей разработки.

Для регулировки частоты вращения применяется частотный преобразователь производства фирмы KEB. Грузоподъемность лифтов производства института «НИПТИЭМ» до 1000 кг, скорость движения лифтовой кабины до 2 м/с.
Плюсы редукторных лифтовых лебедок
- За счет использования доступных и простых в изготовлении АД и редукторов такие лифтовые установки используются при бюджетном строительстве зданий и сооружений.
- Привычная эксплуатация, хорошая ремонтопригодность. На территории РФ много заводов, поставляющих как отдельные детали, так и блоки для замены
- Обслуживающий персонал хорошо подготовлен, наличие машинного помещения, где расположены самые ответственные узлы и механизмы, делает обслуживание и ремонт простыми и удобными.
Минусы редукторных лифтовых лебедок
- При работе АД пусковые токи приводят к большему расходу электроэнергии ( до 30 в зависимости от режима эксплуатации).
- КПД меньше 70%, а на переходных режимах не более 40-50%.
- Шумы и вибрация при работе.
- Редуктор – «дополнительная» деталь, способная выйти из строя, требующая постоянного обслуживания
- Установка редукторной лебедки требует отдельного машинного помещения.
Плюсы безредукторных лебедок
- Исключение редуктора – уменьшение металлоемкости всей установки.
- Плавная регулировка хода, точность остановок.
- Низкий шум (не более 60-55 дБ – звук негромкого разговора) и малая вибрация.
- Расход энергии ниже, чем у редукторных лебедок за счет применения частотного регулирования и снижения пусковых токов.
- Габариты позволяют устанавливать лифтовые лебедки непосредственно в шахтах лифтов.
- Большая скорость движения лифтовой кабины.
- Долговечность и отсутствие необходимости в обслуживании.
Минусы безредукторных лебедок
- Дороже, чем редукторная лифтовая лебедка.
- Малая ремонтопригодность — сложность узлов приводит к тому, что в случае выхода из строя отремонтировать их практически невозможно, или ремонт сопоставим с приобретением нового оборудования.
- При приобретении необходимо учитывать возможность сопряжения между собой электродвигателя, датчиков и системы управления.
Особенности заказа безредукторных лифтов.
Необходимо определиться с назначением лифта. В зависимости от того какие функции будет нести лифт – пассажирский, грузовой, больничный, автомобильный — будут зависеть все остальные параметры.
Выбор производителя. Лифт – сложное и дорогостоящее оборудование. При выборе надо обратить внимание на опыт (срок существования предприятия), наличие разрешительной документации (лицензии, сертификаты). Узнайте о гарантии на лифт и наличии сервисной службы именно по этому лифту у вас в городе или, хотя бы, в регионе. Если фирма-производитель (поставщик) предоставляет услуги шеф-монтажа, когда опытные специалисты если и не монтируют оборудование, то, все оборудование будет смонтировано и отлажено правильно в соответствии с инструкциями завода. У завода-изготовителя может быть опросный лист для заказа его продукции, в котором запрашиваются строительные чертежи, план шахты, развертку стен шахты с указанием вида крепления закладных элементов, план машинного помещения с указанием осей шахты, кабины, и т.д.
Определитесь с бюджетом. Лифты одной линейки и у одного производителя могут различаться по цене в зависимости от комплектации и дополнительных функций.. Необходимо помнить, что покупная стоимость лифта с асинхронным двигателем в качестве привода и частотным регулированием ниже, чем у лифта с приводом от СДПМ. Самый бюджетный вариант – с редукторной лебедкой.
Выбор и заказ безредукторной лебедки лучше всего поручить специалисту, непосредственно обслуживающему лифт. Как и в любой системе замена одной детали может повлечь за собой изменение всей установки. Рассмотрим особенности заказа безредукторных (БР) приводов, лежащие на поверхности.
Расположение привода. Расположение может быть в отдельном помещении, может быть в шахте лифта и размещено сверху, снизу, сбоку. Если лифтовая лебедка принципиально другая, то встает проблема переделки креплений всей системы подвеса, направление движения канатов, кабины, противовеса. Нет нужды упоминать, что на всю конструкцию необходима будет документация, ее согласование и защита перед соответствующими надзорными органами.
Выбор самой лифтовой лебедки. Грузоподъемность должна быть в соответствии с требованиями к пассажиропотоку, высоте здания и др, что приведет к вопросу о габаритах лифтовой кабины. Скорость движения, задаваемая лебедкой, будет зависеть от высоты подъема и пожеланий заказчика. Грузоподъемность и скорость повлияют на выбор тросов, которые изменят канатоведущий шкив. На рынке имеется весьма обширное предложение лифтовых безредукторных лебедок (БРЛ). Крупные производители лифтов разрабатывают и выпускают лифтовые лебедки для своих нужд и нужд более мелких производителей лифтов. В России имеется ряд заводов, выпускающих безредукторные лебедки на уровне зарубежных.
Источник
Продукты
Безредукторный привод лифтов
В настоящее время в России эксплуатируется свыше 400 тыс. лифтов, при этом около 100 тыс лифтов уже отработали свой срок службы. При этом более половины из этих лифтов оборудованы морально устаревшими электрическими приводами, которые не обеспечивают надежного и энергоэффективного использования лифта.
В соответствии с требованиями Таможенного союза «Безопасность лифтов» от 18 октября 2011 года №824, лифты введенные в эксплуатацию до 5 февраля 2013 года и отработавшие 25 лет, должны быть приведены к требованиям техрегламента до 15 февраля 2020 года.
Сейчас самым распространенным приводом лифтов в России является лебедка, с червячным редуктором, но этот привод имеет ряд недостатков. КПД. современной редукторной лебедки в номинальном режиме работы не достигает и 70%, а в переходных режимах и вовсе падает до 40-50%. Столь большие потери являются следствием работы контактных поверхностей червячной пары, трения в подшипниках, вязкости масла и т.д. Наличие масла создает дополнительные проблемы в эксплуатации. Для повышения эффективности работы электрических лебедок и существенного снижения затрат на обслуживание и электроэнергию при эксплуатации лифтов была разработана безредукторная схема привода.
Идея использовать безредукторную схему не нова. Обычно для безредукторного привода применяется синхронный многополюсный (до 2р=24) двигатель, выполненный с применением магнитов из редкоземельных материалов Nd-Fe-B или Sm-Co, (СДПМ). Распространению данных двигателей способствовал Китай, продающий достаточно дешевые магнитные материалы.
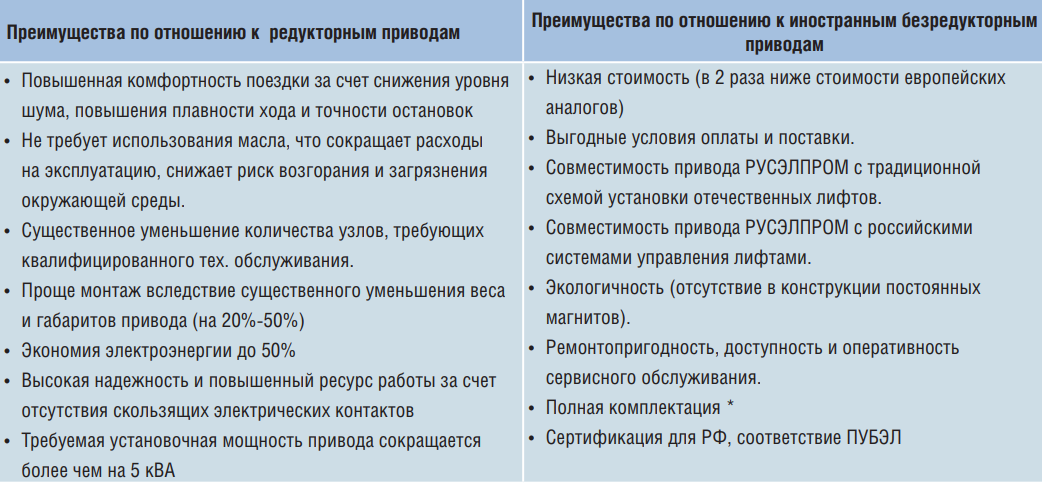
Несовершенства синхронного привода на постоянных магнитах:
- Высокая стоимость (лебедка на постоянных магнитах требует более дорогого преобразователя частоты).
- Низкий ресурс работы.
- Низкая совместимость с отечественными станциями управления лифтами.
- Низкая ремонтопригодность.
- Проблемы с утилизацией отработавших ресурс устройств (стоимость утилизации магнитов соизмерима со стоимостью самого электродвигателя).
Сравнительная таблица энергоэффективности и экологичности классических редукторных лебедок и безредукторных приводов лифта, на примере привода лифта на 630 кг, подвес 2:1, скорость 1м/с.
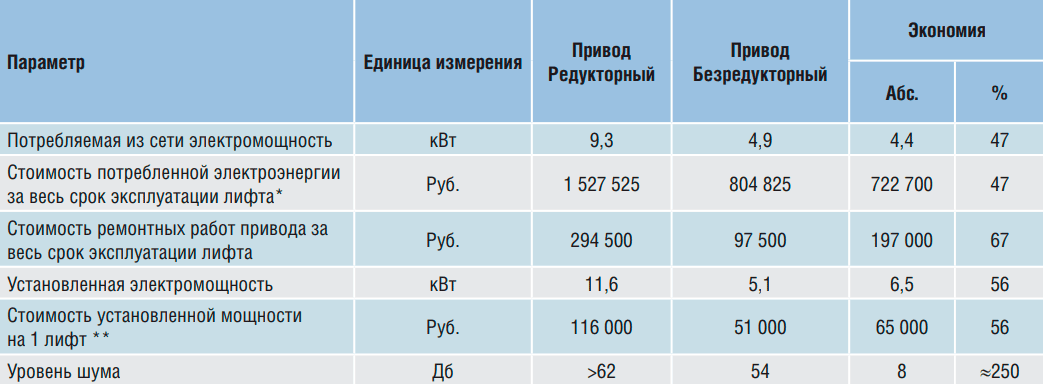
При сроке эксплуатации 25 лет и стоимости 1кВа 50 тысяч рублей мы получаем следующие данные:

То есть, использование безредукторной лебедки «Русэлпром» позволяет экономить более 1 млн. рублей, при этом стоимость комплекса безредукторного привода лифта по цене соизмерима с редукторным приводом.
Источник
Безредукторный электропривод лифта (варианты)























Владельцы патента RU 2619162:
Изобретение применяется в регулируемых безредукторных асинхронных электроприводах лифтовых установок. Безредукторный электропривод лифта содержит полиспастную подвеску кабины, преобразователь частоты (9) с возможностью формирования напряжений с пониженными по отношению к частоте сети (10) частотами и низкочастотный асинхронный двигатель (1), подключенный к выходу преобразователя частоты (9) и предназначенный для работы с указанными напряжениями. Наибольшее значение пониженной частоты на выходе преобразователя частоты (9) установлено в зависимости от заданной номинальной скорости кабины лифта в соответствии с выражением
где — наибольшее значение пониженной частоты на выходе преобразователя частоты;
νном — заданная номинальная скорость кабины лифта;
iпп — кратность полиспастной подвески кабины;
p — число пар полюсов обмотки статора асинхронного двигателя;
Dш — диаметр канатоведущего шкива лифта;
Обмотки статора низкочастотного двигателя выполнены на номинальное напряжение сети и наибольшее значение пониженной частоты. Предложены также варианты безредукторного электропривода лифта. Достигается задача одновременно со снижением тока в обмотке статора приводного двигателя, уменьшения габаритов и стоимости приводного асинхронного двигателя. 3 н.п. ф-лы, 2 ил.
Предлагаемое техническое решение относится к области электротехники и может использоваться преимущественно в регулируемых безредукторных асинхронных электроприводах лифтовых установок.
Известен безредукторный электропривод лифта [Яновски Л. Проектирование механического оборудования лифтов. М.: Монография. Издательство АСВ. 2005, с. 134-144], содержащий асинхронный двигатель и преобразователь частоты, подключенный к сети переменного тока. Недостатком данного устройства является использование асинхронного двигателя, выполненного с числом витков обмотки статора, соответствующих номинальному напряжению и номинальной частоте сети, в диапазоне частот, значительно меньших номинальной. При этом преобразователь частоты должен быть выбран на номинальный ток указанного двигателя и имеет относительно высокую стоимость.
Наиболее близким по технической сущности к предлагаемым первому, второму и третьему вариантам изобретения является техническое решение [патент на полезную модель №55224, класс Н02К 3/00 и Н02К 17/00], в котором асинхронный двигатель для безредукторного электропривода, содержащего преобразователь частоты с возможностью формирования напряжений с пониженными по отношению к частоте сети частотами, выполнен с повышенным числом витков обмотки статора, что приводит к уменьшению тока, на который выбирается преобразователь частоты, и обеспечивает снижение его стоимости.
Недостатком данной полезной модели является использование приводного асинхронного двигателя с относительно большими габаритами.
В предлагаемых вариантах технического решения ставится задача одновременно со снижением тока уменьшить габариты и стоимость приводного асинхронного двигателя.
Решение поставленной задачи в первом варианте изобретения достигается тем, что в безредукторном электроприводе лифта, содержащем полиспастную подвеску кабины, преобразователь частоты с возможностью формирования напряжений с пониженными по отношению к частоте сети частотами и низкочастотный асинхронный двигатель, подключенный к выходу преобразователя частоты и предназначенный для работы с указанными напряжениями, наибольшее значение пониженной частоты на выходе преобразователя частоты установлено в зависимости от заданной номинальной скорости кабины лифта в соответствии с выражением
 ,
,
где  — наибольшее значение пониженной частоты на выходе преобразователя частоты;
— наибольшее значение пониженной частоты на выходе преобразователя частоты;
νном — заданная номинальная скорость кабины лифта;
iпп — кратность полиспастной подвески кабины;
р — число пар полюсов обмотки статора асинхронного двигателя;
Dш — диаметр канатоведущего шкива лифта;
 — частота питающей сети,
— частота питающей сети,
а обмотки статора низкочастотного асинхронного двигателя выполнены на номинальное напряжение сети и наибольшее значение пониженной частоты.
Решение поставленной задачи во втором варианте изобретения достигается тем, что в безредукторном электроприводе лифта, содержащем полиспастную подвеску кабины, преобразователь частоты с возможностью формирования напряжений с пониженными по отношению к частоте сети частотами и низкочастотный асинхронный двигатель, подключенный к выходу преобразователя частоты и предназначенный для работы с указанными напряжениями, наибольшее значение пониженной частоты на выходе преобразователя частоты установлено в зависимости от заданной номинальной скорости кабины лифта в соответствии с выражением
,
где — наибольшее значение пониженной частоты на выходе преобразователя частоты;
νном — заданная номинальная скорость кабины лифта;
iпп — кратность полиспастной подвески кабины;
р — число пар полюсов обмотки статора асинхронного двигателя;
Dш — диаметр канатоведущего шкива лифта;
— частота питающей сети,
а обмотки статора низкочастотного асинхронного двигателя выполнены на номинальное напряжение сети и наибольшее значение пониженной частоты с числом витков, определяемым по формуле
 ,
,
где w1,нч — число витков обмотки статора низкочастотного асинхронного двигателя;
w1 — расчетное число витков обмотки статора асинхронного двигателя, определяемое по номинальному напряжению и номинальной частоте сети;
Uc — действующее значение фазного номинального напряжения сети;
 — действующее значение фазного напряжения на статоре асинхронного двигателя с расчетным числом витков, задающее при наибольшем значении пониженной частоты такой же критический момент, как и при номинальных значениях фазного напряжения и частоты сети.
— действующее значение фазного напряжения на статоре асинхронного двигателя с расчетным числом витков, задающее при наибольшем значении пониженной частоты такой же критический момент, как и при номинальных значениях фазного напряжения и частоты сети.
Решение поставленной задачи в третьем варианте изобретения достигается тем, что в безредукторном электроприводе лифта, содержащем полиспастную подвеску кабины, преобразователь частоты с возможностью формирования напряжений с пониженными по отношению к частоте сети частотами и низкочастотный асинхронный двигатель, подключенный к выходу преобразователя частоты и предназначенный для работы с указанными напряжениями, наибольшее значение пониженной частоты на выходе преобразователя частоты установлено в зависимости от заданной номинальной скорости кабины лифта в соответствии с выражением
,
где — наибольшее значение пониженной частоты на выходе преобразователя частоты;
νном — заданная номинальная скорость кабины лифта;
iпп — кратность полиспастной подвески кабины;
р — число пар полюсов обмотки статора асинхронного двигателя;
Dш — диаметр канатоведущего шкива лифта;
— частота питающей сети,
а обмотки статора низкочастотного двигателя выполнены на заданное номинальное напряжение и наибольшее значение пониженной частоты с числом витков, определяемым по формуле
,
где w1,нч — число витков обмотки статора низкочастотного асинхронного двигателя;
w1 — расчетное число витков обмотки статора асинхронного двигателя, определяемое по его номинальным значениям напряжения и частоты;
Uн — действующее значение заданного фазного номинального напряжения на статоре низкочастотного асинхронного двигателя;
— действующее значение фазного напряжения на статоре асинхронного двигателя с расчетным числом витков, задающее при наибольшем значении пониженной частоты низкочастотного двигателя такой же критический момент, как и при его номинальных значениях фазного напряжения и частоты.
На фиг. 1 изображен безредукторный вариант кинематической схемы лифта с полиспастной подвеской кабины и приводным двигателем. На фиг. 2 показана схема электропривода.
Кинематическая схема лифта содержит асинхронный двигатель 1, на валу которого установлены канатоведущий шкив 2 и тормозное устройство 3. Канатоведущий шкив 2 охватывается тяговым канатом 4, который огибает полиспастные блоки 5 и 6 и обеспечивает движение кабины 7 и противовеса 8. Приведенная на фиг. 1 кратность полиспастной подвески равна двум. Для реализации вариантов предлагаемого технического решения возможно также использовать полиспастные подвески с кратностью 3 и 4.
Обмотки статора двигателя 1 подключены к выходу преобразователя 9 частоты, вход которого соединен с сетью 10 переменного тока. Преобразователь 9 снабжен блоком 11 управления, с помощью которого устанавливают указанное в формуле изобретения наибольшее значение пониженной частоты на выходе преобразователя и задают требуемые в процессе работы лифта значения напряжения и частоты для асинхронного двигателя.
Принцип действия предлагаемого технического решения заключается в следующем.
Поскольку электропривод лифта безредукторный, момент сопротивления Мс двигателя практически равен моменту на канатоведущем шкиве. При подъеме номинального груза момент сопротивления достигает максимального значения
 ,
,
определяющего наибольшее значение потребляемой мощности в установившемся режиме
 .
.
В последних формулах Q — масса номинального груза в кабине; g=9,81 м/с 2 ;  — синхронная скорость асинхронного двигателя, соответствующая наибольшему значению пониженной частоты; ΔP1эл — электрические потери в обмотке статора.
— синхронная скорость асинхронного двигателя, соответствующая наибольшему значению пониженной частоты; ΔP1эл — электрические потери в обмотке статора.
Вследствие наличия полиспастной подвески сила натяжения каната уменьшается пропорционально ее кратности. Со снижением силы натяжения каната соответственно снижают его сечение, а также и диаметр канатоведущего шкива, поскольку между диаметрами шкива и каната поддерживают следующее соотношение: Dш/dк≈30÷45, где dк — диаметр каната.
Согласно формуле для момента сопротивления Мс,max при введении полиспастной подвески и уменьшении диаметра канатоведущего шкива существенно уменьшается момент приводного двигателя, что соответственно приводит к снижению его габаритов и стоимости.
При использовании вариантов предлагаемого технического решения, кроме уменьшения момента приводного двигателя, также снижается ток в его обмотке статора. Действительно, низкочастотный асинхронный двигатель представляет собой двигатель традиционной конструкции, обмотка статора которого рассчитана на наибольшее значение пониженной частоты на выходе преобразователя частоты и на максимально возможное напряжение. При этом ток статора имеет минимально возможное значение, так как потребляемая мощность P1 асинхронного двигателя пропорциональна действующим значениям напряжения и тока.
Предполагается, что для второго и третьего вариантов предлагаемого изобретения выполнены проектировочные расчеты вспомогательных асинхронных двигателей на заданные значения номинальных моментов, напряжений и частот. По результатам расчета таких двигателей, которые можно назвать базовыми, известны все параметры их Т-образных схем замещения. Параметры базового двигателя используются далее для облегченного расчета рабочего асинхронного двигателя, подключенного к преобразователю частоты. Частоты выходных напряжений этого преобразователя всегда ниже частоты питающей сети, поэтому такие рабочие двигатели можно назвать низкочастотными.
В качестве базовых двигателей для второго варианта предлагаемого технического решения используются асинхронные двигатели, рассчитанные на номинальную частоту питающей сети, а для третьего варианта — низкочастотные асинхронные двигатели, рассчитанные на пониженную частоту.
В качестве рабочих двигателей для предлагаемого изобретения применяются низкочастотные асинхронные двигатели, которые отличаются от соответствующих базовых только числом витков обмотки статора.
Поскольку значения параметров Т-образной схемы замещения асинхронного двигателя приведены к цепи статора, они пропорциональны квадрату числа витков обмотки статора. Поэтому параметры рабочего низкочастотного двигателя связаны с соответствующими известными параметрами базового двигателя следующим образом:




 ,
,
где  — отношение числа витков обмоток статора рабочего и базового двигателей; R1,
— отношение числа витков обмоток статора рабочего и базового двигателей; R1,  и Lσ1,
и Lσ1,  — активные сопротивления и индуктивности рассеяния обмоток соответственно статора, ротора базового двигателя; М0 — взаимная индуктивность ветви намагничивания базового двигателя.
— активные сопротивления и индуктивности рассеяния обмоток соответственно статора, ротора базового двигателя; М0 — взаимная индуктивность ветви намагничивания базового двигателя.
Анализ второго варианта технического решения. Для второго варианта технического решения в качестве базового использован асинхронный двигатель, рассчитанный на номинальную частоту и номинальное напряжение питающей сети и обозначенный как «б2».
Критические моменты базового двигателя равны:
при номинальной частоте и номинальном напряжении сети
 ;
;
при наибольшем значении пониженной частоты
 ,
,
где Uc и  — номинальные значения фазного напряжения и круговой частоты сети;
— номинальные значения фазного напряжения и круговой частоты сети;
 и
и  — фазное напряжение базового двигателя и круговая частота, соответствующая наибольшему значению пониженной частоты
— фазное напряжение базового двигателя и круговая частота, соответствующая наибольшему значению пониженной частоты  рабочего двигателя.
рабочего двигателя.
Согласно пояснению напряжения , приведенному в формуле изобретения для второго варианта, критические моменты  и
и  базового двигателя одинаковы. Поэтому, приравнивая далее эти критические моменты друг к другу, получаем выражение для напряжения
базового двигателя одинаковы. Поэтому, приравнивая далее эти критические моменты друг к другу, получаем выражение для напряжения  в виде:
в виде:
 .
.
Критический момент рабочего низкочастотного двигателя, обозначенного как «р2», при наибольшем значении пониженной частоты равен:

где  — коэффициент отношения числа витков рабочего и базового асинхронных двигателей.
— коэффициент отношения числа витков рабочего и базового асинхронных двигателей.
Из выражений для критических моментов рабочего  и базового
и базового  асинхронных двигателей при наибольшем значении пониженной частоты следует:
асинхронных двигателей при наибольшем значении пониженной частоты следует:
 .
.
Принимая в последней формуле условие  , получаем два равенства:
, получаем два равенства:
 ;
;
 .
.
Первое равенство представляет собой формулу для числа витков обмотки статора рабочего низкочастотного асинхронного двигателя. Из второго равенства следует, что при наибольшем значении пониженной частоты критические моменты рабочего и базового двигателей одинаковые.
Согласно формуле изобретения для второго варианта обмотки статора низкочастотного двигателя выполнены с числом витков, определяемым по выражению
 ,
,
 .
.
Таким образом, kW2≤kw2. В этом случае согласно формуле для критического момента рабочего двигателя его значение  может возрасти на 20-25% при небольшом увеличении тока статора, что приведет к увеличению перегрузочной способности низкочастотного асинхронного двигателя.
может возрасти на 20-25% при небольшом увеличении тока статора, что приведет к увеличению перегрузочной способности низкочастотного асинхронного двигателя.
Анализ третьего варианта технического решения. Для третьего варианта технического решения в качестве базового использован низкочастотный асинхронный двигатель, обозначенный как «б3».
Критические моменты этого базового двигателя равны:
при его номинальных значениях напряжения и частоты
 ;
;
при наибольшем значении пониженной частоты соответствующего рабочего двигателя, обозначенного как «р3»,
 ,
,
где Uб3 и  — номинальные значения фазного напряжения и круговой частоты базового двигателя «б3»;
— номинальные значения фазного напряжения и круговой частоты базового двигателя «б3»;
 и
и  — фазное напряжение базового двигателя «б3» и круговая частота, соответствующая наибольшему значению пониженной частоты
— фазное напряжение базового двигателя «б3» и круговая частота, соответствующая наибольшему значению пониженной частоты  рабочего двигателя «р3».
рабочего двигателя «р3».
Согласно пояснению напряжения  , приведенному в формуле изобретения для третьего варианта, критические моменты
, приведенному в формуле изобретения для третьего варианта, критические моменты  и
и  одинаковы. Поэтому, приравнивая далее эти критические моменты друг к другу, получаем выражение для напряжения
одинаковы. Поэтому, приравнивая далее эти критические моменты друг к другу, получаем выражение для напряжения  в виде:
в виде:
 .
.
Критический момент рабочего низкочастотного двигателя «р3» при наибольшем значении пониженной частоты и его номинальном напряжении равен:
 ,
,
где Uр3 — заданное номинальное значение фазного напряжения рабочего низкочастотного двигателя «р3»;
 — коэффициент отношения числа витков рабочего и базового асинхронных двигателей.
— коэффициент отношения числа витков рабочего и базового асинхронных двигателей.
Из выражений для критических моментов рабочего  и базового
и базового  асинхронных двигателей при наибольшем значении пониженной частоты следует:
асинхронных двигателей при наибольшем значении пониженной частоты следует:
 .
.
Принимая в последней формуле условие  , получаем два равенства:
, получаем два равенства:
 ;
;
 .
.
Первое равенство представляет собой формулу для числа витков обмотки статора рабочего низкочастотного асинхронного двигателя «р3». Из второго равенства следует, что при наибольшем значении пониженной частоты критические моменты рабочего и базового двигателей одинаковые.
Согласно формуле изобретения для третьего варианта обмотки статора низкочастотного двигателя выполнены с числом витков, определяемым по выражению
 ,
,
 .
.
Таким образом, kW3≤kw3. В этом случае согласно формуле для критического момента рабочего двигателя его значение  может возрасти на 20-25% при небольшом увеличении тока статора, что приведет к увеличению перегрузочной способности низкочастотного асинхронного двигателя.
может возрасти на 20-25% при небольшом увеличении тока статора, что приведет к увеличению перегрузочной способности низкочастотного асинхронного двигателя.
Согласно формуле изобретения и проведенному анализу второго и третьего вариантов технического решения числа витков обмоток статора рабочих двигателей определяются по значениям соответствующих фазных напряжений  или
или  базовых двигателей, которые можно определить расчетным или экспериментальным путем. Расчетным путем эти напряжения определяются по приведенным выше формулам, которые получены для упрощенной схемы замещения асинхронного двигателя. Можно показать, что результаты расчетов по указанным формулам близки к соответствующим результатам, полученным для Т-образной схемы замещения. При этом выражения для чисел витков рабочих низкочастотных асинхронных двигателей не изменяются.
базовых двигателей, которые можно определить расчетным или экспериментальным путем. Расчетным путем эти напряжения определяются по приведенным выше формулам, которые получены для упрощенной схемы замещения асинхронного двигателя. Можно показать, что результаты расчетов по указанным формулам близки к соответствующим результатам, полученным для Т-образной схемы замещения. При этом выражения для чисел витков рабочих низкочастотных асинхронных двигателей не изменяются.
Определение указанных напряжений экспериментальным путем производится по следующему алгоритму. Сначала находят критический момент базового двигателя при его номинальных значениях напряжения и частоты. Затем при наибольшем значении пониженной частоты рабочего двигателя подбирают фазное напряжение базового двигателя, при котором его критический момент равен найденному ранее. Подобранное таким образом напряжение и является искомым. Подставляя далее его значение в соответствующую формулу полезной модели, находят число витков обмотки статора рабочего двигателя.
При использовании данного алгоритма определения требуемого числа витков обмотки статора рабочий двигатель может быть изготовлен без дальнейших сложных расчетов.
Наиболее удобно производить рабочие низкочастотные асинхронные двигатели на базе двигателей, выпускаемых электромеханическими заводами. Действительно, если учесть, что рабочие и базовые двигатели отличаются друг от друга только числом витков обмотки статора, то, подбирая по моменту двигатель из выпускаемых заводами в качестве базового, нетрудно рассчитать и изготовить соответствующий рабочий низкочастотный двигатель. Таким путем можно значительно расширить номенклатуру выпускаемых низкочастотных асинхронных двигателей, в частности, для безредукторных асинхронных электроприводов лифтов.
Предлагаемый безредукторный электропривод лифта обеспечивает уменьшение токов статора и преобразователя частоты, а также снижение габаритов двигателя и соответственно всей лифтовой лебедки, что очень важно, в частности, для лифтов без машинного помещения.
1. Безредукторный электропривод лифта, содержащий полиспастную подвеску кабины, преобразователь частоты с возможностью формирования напряжений с пониженными по отношению к частоте сети частотами и низкочастотный асинхронный двигатель, подключенный к выходу преобразователя частоты и предназначенный для работы с указанными напряжениями, отличающийся тем, что наибольшее значение пониженной частоты на выходе преобразователя частоты установлено в зависимости от заданной номинальной скорости кабины лифта в соответствии с выражением
 ,
,
где  — наибольшее значение пониженной частоты на выходе преобразователя частоты;
— наибольшее значение пониженной частоты на выходе преобразователя частоты;
νном — заданная номинальная скорость кабины лифта;
iпп — кратность полиспастной подвески кабины;
p — число пар полюсов обмотки статора асинхронного двигателя;
Dш — диаметр канатоведущего шкива лифта;
 — частота питающей сети
— частота питающей сети
а обмотки статора низкочастотного двигателя выполнены на номинальное напряжение сети и наибольшее значение пониженной частоты.
2. Безредукторный электропривод лифта, содержащий полиспастную подвеску кабины, преобразователь частоты с возможностью формирования напряжений с пониженными по отношению к частоте сети частотами и низкочастотный асинхронный двигатель, подключенный к выходу преобразователя частоты и предназначенный для работы с указанными напряжениями, отличающийся тем, что наибольшее значение пониженной частоты на выходе преобразователя частоты установлено в зависимости от заданной номинальной скорости кабины лифта в соответствии с выражением
,
где — наибольшее значение пониженной частоты на выходе преобразователя частоты;
νном — заданная номинальная скорость кабины лифта;
iпп — кратность полиспастной подвески кабины;
p — число пар полюсов обмотки статора асинхронного двигателя;
Dш — диаметр канатоведущего шкива лифта;
 — частота питающей сети,
— частота питающей сети,
а обмотки статора низкочастотного двигателя выполнены на номинальное напряжение сети и наибольшее значение пониженной частоты с числом витков, определяемым по формуле
 ,
,
где w1,нч — число витков обмотки статора низкочастотного асинхронного двигателя;
w1 — расчетное число витков обмотки статора асинхронного двигателя, определяемое по номинальному напряжению и номинальной частоте сети;
Uc — действующее значение фазного номинального напряжения сети;
 — действующее значение фазного напряжения на статоре асинхронного двигателя с расчетным числом витков, задающее при наибольшем значении пониженной частоты такой же критический момент, как и при номинальных значениях фазного напряжения и частоты сети.
— действующее значение фазного напряжения на статоре асинхронного двигателя с расчетным числом витков, задающее при наибольшем значении пониженной частоты такой же критический момент, как и при номинальных значениях фазного напряжения и частоты сети.
3. Безредукторный электропривод лифта, содержащий полиспастную подвеску кабины, преобразователь частоты с возможностью формирования напряжений с пониженными по отношению к частоте сети частотами и низкочастотный асинхронный двигатель, подключенный к выходу преобразователя частоты и предназначенный для работы с указанными напряжениями, отличающийся тем, что наибольшее значение пониженной частоты на выходе преобразователя частоты установлено в зависимости от заданной номинальной скорости кабины лифта в соответствии с выражением
,
где — наибольшее значение пониженной частоты на выходе преобразователя частоты;
νном — заданная номинальная скорость кабины лифта;
iпп — кратность полиспастной подвески кабины;
p — число пар полюсов обмотки статора асинхронного двигателя;
Dш — диаметр канатоведущего шкива лифта;
 — частота питающей сети,
— частота питающей сети,
а обмотки статора низкочастотного двигателя выполнены на заданное номинальное напряжение и наибольшее значение пониженной частоты с числом витков, определяемым по формуле
 ,
,
где w1,нч — число витков обмотки статора низкочастотного асинхронного двигателя;
w1 — расчетное число витков обмотки статора асинхронного двигателя, определяемое по его номинальным значениям напряжения и частоты;
Uн — действующее значение заданного фазного номинального напряжения на статоре низкочастотного асинхронного двигателя;
— действующее значение фазного напряжения на статоре асинхронного двигателя с расчетным числом витков, задающее при наибольшем значении пониженной частоты низкочастотного двигателя такой же критический момент, как и при его номинальных значениях фазного напряжения и частоты.
Источник



