
Способы торможения электродвигателей
 Электродвигатели в электроприводе могут быстро остановить производственный механизм, или удержать определенную скорость при положительном моменте рабочей машины. В этом случае двигатель обращается в генератор и работает в одном из тормозных режимов : противовключения, динамическом, рекуперативном (смотрите рис. 1) в зависимости от способа возбуждения.
Электродвигатели в электроприводе могут быстро остановить производственный механизм, или удержать определенную скорость при положительном моменте рабочей машины. В этом случае двигатель обращается в генератор и работает в одном из тормозных режимов : противовключения, динамическом, рекуперативном (смотрите рис. 1) в зависимости от способа возбуждения.
Торможение электропривода посредством переключения обмоток фаз электродвигателя для получения вращения поля в противоположном направлении ( торможение противовключением ) применяют, когда необходимо быстро остановить машинное устройство. При этом по инерции ротор вращается навстречу магнитному потоку, скольжение электродвигателя становится больше единицы, а момент — отрицательным.
В двигателе постоянного тока для осуществления торможения противовключением меняют подключение концов обмоток якоря. При этом ток в якоре и момент меняют направление.
В обоих случаях действующее напряжение становится большим, поэтому для ограничения тока и момента переключение осуществляется с одновременным включением резисторов в цепь якоря или ротора.Энергия торможения и поступающая из сети рассеивается в обмотках якоря и в резисторах.
Динамическое торможение характеризуется тем, что электрическая машина работает генератором (динамо) с рассеиванием энергии торможения в тормозных резисторах и обмотках электродвигателя.
Для динамического торможения якорь двигателя постоянного тока отключают от источника питания и включают на сопротивление, а обмотка возбуждения остается под напряжением, асинхронных двигателях динамическое торможение достигается подачей постоянного тока в обмотку статора двигателя.
Постоянный ток создает неподвижное магнитное поле. При вращении ротора в его обмотках наводится ЭДС и появляется ток. Взаимодействие тока ротора с неподвижным магнитным полем создает тормозной момент. Значение тормозного момента зависит от тока возбуждения, частоты вращения и сопротивления цепи ротора (якоря).
В режиме рекуперативного торможения ротор (якорь) подключенного к сети электродвигателя вращается со скоростью, большей ωо. В этом случае ток изменяет направление, электрическая машина становится генератором, работающим параллельно с сетью, энергия торможения за вычетом потерь отдается в электрическую сеть.
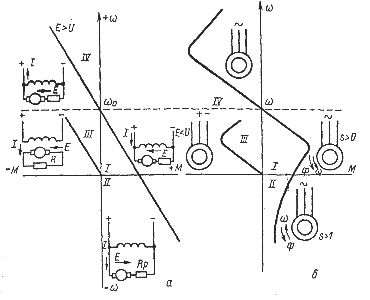
Рис. 1. Включение и механические характеристики электродвигателей: независимым возбуждением (а) и асинхронного (б) в режимах: I — двигательном, II — противовключения, III — динамического торможения, I V — генераторном с отдачей энергии в сеть.
Рекуперативное торможение используется в подъемных кранах, для удержания скорости при опускании грузов, для испытания и обкатки под нагрузкой автомобильных и тракторных двигателей, редукторов, коробок перемены передач под нагрузкой, а также во время перехода с большей скорости на меньшую в многоскоростных электродвигателях.
Если Вам понравилась эта статья, поделитесь ссылкой на неё в социальных сетях. Это сильно поможет развитию нашего сайта!
Подписывайтесь на наш канал в Telegram!
Просто пройдите по ссылке и подключитесь к каналу.
Не пропустите обновления, подпишитесь на наши соцсети:
Источник
Электромагнитные тормозные устройства
В некоторых устройствах, с целью торможения вращающихся элементов машины, применяется электромагнитный дисковый тормоз электродвигателя. Электромагнитное тормозное устройство монтируется прямо в двигателе или на двигателе, и по сути представляет собой вспомогательный двигатель или приводной узел, отвечающий всем требованиям касательно как позиционирования агрегата, так и с точки зрения безопасной его эксплуатации. Он включается пружинами и отпускается с помощью электромагнита.
Данное решение позволяет не только обеспечить безопасное торможение двигателя в случае аварии или позиционировать исполнительный орган машины во время ее функционирования, но и просто сокращает время работы машины во время ее торможения.
Существуют два типа дисковых электромагнитных тормозных устройств: дисковый тормоз переменного тока и дисковый тормоз постоянного тока (в зависимости от формы тока, которым питается данный тормоз). Для варианта тормоза, питаемого постоянным током, вместе с двигателем поставляется также и выпрямитель, при помощи которого постоянный ток получается из переменного, которым питается сам двигатель.
Конструкция тормозного устройства включает в себя: электромагнит, якорь и диск. Электромагнит изготовлен в виде набора катушек, расположенных в специальном корпусе. Якорь служит исполнительным элементом тормоза, и представляет собой антифрикционную поверхность, которая взаимодействует с тормозным диском.

Сам диск, с нанесенным на него фрикционным материалом, перемещается по зубцам втулки на валу двигателя. Когда в катушки тормозного устройства подано напряжение, якорь оттянут, и вал двигателя может свободно вращаться вместе с тормозным диском.
Затормаживание обеспечивается в свободном состоянии, когда пружины нажимают на якорь, и он воздействует на тормозной диск, вызывая тем самым остановку вала.
Тормоза такого типа находят обширное применение в системах с электрическим приводом. На случай аварийного отсутствия питания тормозного устройства, может быть предусмотрена возможность снять тормоз вручную.

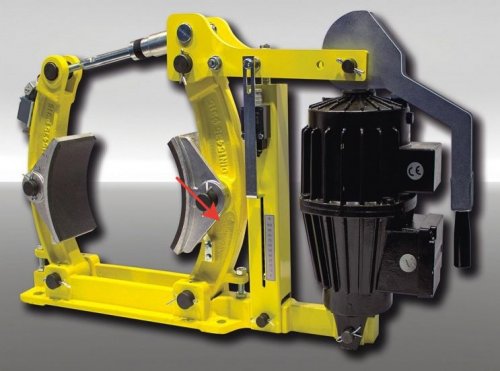
В подъемно-транспортных машинах используется колодочный электромагнитный тормоз (ТКГ), удерживающий вал в заторможенном состоянии когда машина выключена.
ТКП — тормоз постоянного тока серии МП. ТКГ — тормоз электрогидравлический с толкателем серии ТЭ. Электромагнит тормоза ТКГ включает в себя привод и механическую часть, которая в свою очередь включает: подставку, пружины, систему рычагов и тормозные колодки.
Тормозное устройство устанавливается вертикально, причем тормозной шкив имеет горизонтальное положение. Механические части тормозных устройств питаемых переменным или постоянным током для шкивов одного и того же диаметра одинаковы.
Обычно такие устройства имеют буквенное обозначение ТК и число, обозначающее диаметр шкива для торможения. В момент включения питания рычаги нейтрализуют действие пружин и освобождают шкив для обеспечения ему возможности свободного вращения.

Электромагнитные тормоза находят применение в:
блокировке подъемных кранов, лифтов, укладочных машин и т. д. в выключенном состоянии; в механизмах остановки конвейеров, намоточных и ткацких станков, задвижек, прокатного оборудования и т. д.;
для сокращения выбега (времени холостого хода во время остановки) машин;
в системах аварийной остановки эскалаторов, мешалок и т. д.;
для остановки с позиционированием в точном положении в определенный момент времени.
В буровых установках применяется индукционное торможение, основанное на взаимодействии магнитных полей индуктора, в роли которого выступает электромагнит, и якоря, в обмотке которого наводятся токи, магнитные поля которых тормозят «причину их вызывающую» (см. Закон Ленца), создавая тем самым необходимый тормозящий момент ротору.

Рассмотрим это явление на рисунке. Когда в обмотке статора включается ток, его магнитное поле индуцирует вихревой ток в роторе. На вихревой ток в роторе действует сила Ампера, момент которой и является в данном случае тормозящим.
Как известно, в тормозном режиме способны работать асинхронные и синхронные машины переменного тока, а также машины постоянного тока, когда вал движется относительно статора. Если вал неподвижен (относительное перемещение отсутствует), то тормозящего действия не будет.
Таким образом, тормоза на основе электродвигателей применяются для затормаживания движущихся валов, а не для удержания их в состоянии остановки. При этом интенсивность замедления движения механизма можно в таких случаях плавно регулировать, что иногда удобно.
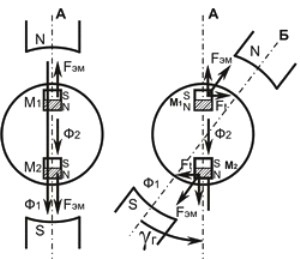
На следующем рисунке приведена схема работы гистерезисного тормоза. Когда в обмотку статора подается ток, на ротор действует вращающий момент, в данном случае он тормозящий, и возникает здесь из-за явления гистерезиса от перемагничивания монолитного ротора.
Физическая причина в том, что намагниченность ротора становится таковой, что его магнитный поток совпадает по направлению с потоком статора. И если ротор попытаться из такого положения повернуть (так чтобы статор оказался относительно ротора в положении Б), то он будет стараться вернуться обратно в положение А за счет тангенциальных составляющих магнитных сил, — так и возникает в данном случае торможение.
Если Вам понравилась эта статья, поделитесь ссылкой на неё в социальных сетях. Это сильно поможет развитию нашего сайта!
Подписывайтесь на наш канал в Telegram!
Просто пройдите по ссылке и подключитесь к каналу.
Не пропустите обновления, подпишитесь на наши соцсети:
Источник
Схемы торможения асинхронных двигателей
 После отключения от сети электродвигатель продолжает движение по инерции. При этом кинетическая энергия расходуется на преодоление всех видов сопротивлений движению. Поэтому скорость электродвигателя через промежуток времени, в течение которого будет израсходована вся кинетическая энергия, становится равной нулю.
После отключения от сети электродвигатель продолжает движение по инерции. При этом кинетическая энергия расходуется на преодоление всех видов сопротивлений движению. Поэтому скорость электродвигателя через промежуток времени, в течение которого будет израсходована вся кинетическая энергия, становится равной нулю.
Такая остановка электродвигателя при движении по инерции называется свободным выбегом . Многие электродвигатели, работающие в продолжительном режиме или со значительными нагрузками, останавливают путем свободного выбега.
В тех же случаях, когда продолжительность свободного выбега значительна и оказывает влияние на производительность электродвигателя (работа с частыми пусками), для сокращения времени остановки применяют искусственный метод преобразования кинетической энергии, запасенной в движущейся системе, называемый торможением .
Все способы торможения электродвигателей можно разделить на два основных вида: механическое и электрическое.
 При механическом торможении кинетическая энергия преобразуется в тепловую, за счет которой происходит нагрев трущихся и прилегающих к ним частей механического тормоза.
При механическом торможении кинетическая энергия преобразуется в тепловую, за счет которой происходит нагрев трущихся и прилегающих к ним частей механического тормоза.
При электрическом торможении кинетическая энергия преобразуется в электрическую и в зависимости от способа торможения двигателя либо отдается в сеть, либо преобразуется в тепловую энергию, идущую на нагрев обмоток двигателя и реостатов.
Наиболее совершенными считают такие схемы торможения, при которых механические напряжения в элементах электродвигателя незначительны
Схемы динамического торможения асинхронных двигателей
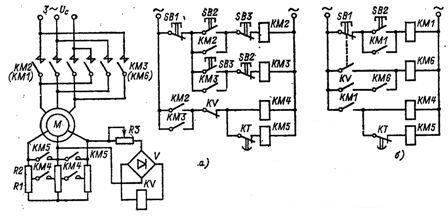
Для управления моментом при динамическом торможении асинхронным двигателем с фазным ротором по программе с заданием времени используются узлы схем, приведенные н а рис. 1, из которых схема р и с. 1, а применяется пр и наличии сети постоянного тока, а схема рис. 1, б — при отсутствии ее.
В качестве тормозных резисторов в роторе используются пусковые резисторы R1, включение которых в режиме динамического торможения производится отключением контакторов ускорения, показанных в рассматриваемых узлах схем условно в виде одного контактора КМ3, команда на отключение которого подается блокировочным контактом линейного контактора КМ1.
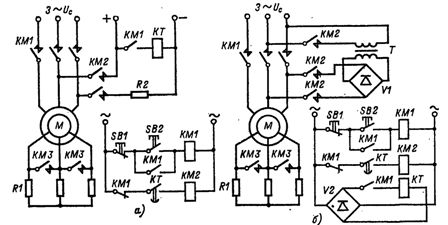
Рис. 1 Схемы управления динамическим торможением асинхронных двигателей с фазным ротором с заданием времени при наличии и отсутствии сети постоянного тока
Эквивалентное значение постоянного тока в обмотке статора при торможении обеспечивается в схеме рис. 1, а дополнительным резистором R2, а в схеме рис. 1. б соответствующим выбором коэффициента трансформации трансформатора Т.
Контактор торможения КМ2 может быть выбран как на постоянном, так и на переменном токе в зависимости от требуемого числа включений в час и использования пусковой аппаратуры.
Приведенные н а рис. 1 схемы управления могут использоваться для управления режимом динамического торможения асинхронного двигателя с короткозамкнутым ротором. Для этого обычно используется схема с трансформатором и выпрямителем, приведенная на р и с. 1 , б.
Схемы торможения противовключением асинхронных двигателей
При управлении моментом при торможении противовключением асинхронного двигателя с короткозамкнутым ротором с контролем скорости применяется узел схемы, приведенный на рис. 2.
В качестве реле противовключения используется реле контроля скорости SR, укрепляемое на двигателе. Реле настраивается на напряжение отпадания, соответствующее скорости, близкой к нулю и равной (0,1 — 0,2) ω уст.
Схема используется для остановки двигателя с торможением противовключением в реверсивной (рис. 2, а) в в нереверсивной (рис. 2, б) схемах. Команда SR используется для отключения контакторов КМ2 или КМЗ и КМ4, отключающих обмотку статора от напряжения сети при скорости двигателя, близкой к нулю. При реверсировании двигателя команды SR не используются.
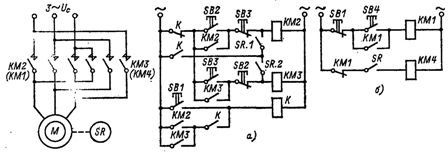
Рис. 2 Узлы схемы управления торможения противовключением асинхронного двигателя с коооткозамкнутым ротором с контролем скорости при остановке в реверсивной и нереверсивной схемах
Узел управления асинхронным двигателем с фазным ротором в режиме торможения противовключеиием с одной ступенью, состоящей из R1 и R2, приведен на рис. 3. Управляющее реле противовключения KV, в качестве которого применяется, например, реле напряжения постоянного тока типа РЭВ301, которое подключено к двум фазам ротора через выпрямитель V. Реле настраивается на напряжение отпадания.
Часто для настройки реле KV используется дополнительный резистор R3. Схема в основном применяется при реверсировании АД со схемой управления, приведенной на рис. 3, а, но может использоваться и при остановке в нереверсивной схеме управления, приведенной на рис. 3, б.
При пуске двигателя реле противовключения КV не вклгочатся и ступень противовключения резистора ротора R1 выводится сразу после подачи управляющей команды на пуск.
Реле KV отключает контакторы КМ4 и КМ5 и тем самым вводит полное сопротивление Rl + R 2 ротор двигателя.
В конце процесса торможения при скорости асинхронного двигателя, близкой к нулю и составляющей примерно 10 — 20 % установившейся начальной скорости ω пер = (0,1 — 0,2) ωуст , реле KV отключается, обеспечивая команду на отключение ступени противовключения R1 с помощью контактора КМ4 и на реверсирование электродвигателя в реверсивной схеме или команду на остановку электродвигателя в нереверсивной схеме.
В приведенных схемах в качестве управляющего устройства может применяться командоконтроллер и другие аппараты.
Схемы механического торможения асинхронных двигателей
При остановке асинхронных двигателей, а также для удержания механизма передвижения или подъема, например в крановых промышленных установках, в неподвижном состоянии при отключенном двигателе применяется механическое торможение. Оно обеспечивается электромагнитными колодочными или другими тормозами с трехфазным электромагнитом переменного тока, который при включении растормаживает тормоз. Электромагнит тормоза YB включается и отключается вместе с двигателем (рис 4, а).
Напряжение на электромагнит тормоза YB может подаваться контактором торможения КМ2, если нужно отключать тормоз не одновременно с двигателем, а с некоторой задержкой по времени, например после окончания электрического торможения (рис. 4, б)
Выдержку времени обеспечивает реле времени КТ, получающее команду на начало отсчета времени, обычно при отключении линейного контактора КМ1 (рис. 4, в).
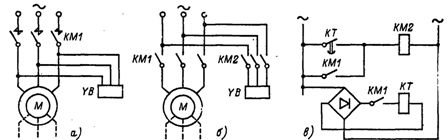
Рис. 4. Узлы схем, осуществляющих механическое торможение асинхронных двигателей
В асинхронных электроприводах применяются также электромагнитные тормоза постоянного тока при управлении электродвигателем от сети постоянного тока.
Схемы конденсаторного торможения асинхронных двигателей
Для торможения АД с короткозамкнутым ротором применяется также конденсаторное торможение с самовозбуждением. Оно обеспечивается конденсаторами C1 — С3, подключенными к обмотке статора. Включаются конденсаторы по схеме звезды (рис. 5, а) или треугольника (рис. 5, б).
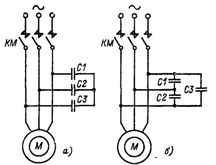
Рис. 5. Узлы схем, осуществляющих конденсаторное торможение асинхронных двигателей
Если Вам понравилась эта статья, поделитесь ссылкой на неё в социальных сетях. Это сильно поможет развитию нашего сайта!
Подписывайтесь на наш канал в Telegram!
Просто пройдите по ссылке и подключитесь к каналу.
Не пропустите обновления, подпишитесь на наши соцсети:
Источник



