
- О приводе постоянного тока
- Эту 2 привод постоянного двигателя
- Основные факторы выбора электродвигателя постоянного или переменного тока
- Различия между двигателями постоянного и переменного тока
- Специфика приводов постоянного и переменного тока в промышленном применении
- Модернизация существующих приводов постоянного тока
- Привод постоянного тока siemens
О приводе постоянного тока
Устройство двигателей постоянного тока
Двигатель постоянного тока (ДПТ) является электрической машиной, преобразующей электрическую энергию в механическую для осуществления технологических процессов в различных областях человеческой деятельности. Основными применениями в промышленности для ДПТ являются процессы, в которых необходимо поддерживать и регулировать скорость вращения вала двигателя независимо от величины нагрузки, например, в металлургии, станкостроении.
В соответствии с принципом действия, двигатели постоянного тока имеют три основных функциональных элемента: магнитную систему с постоянным или регулируемым магнитным полем, обмотку, в которой происходит преобразование энергии и расположенную на вращающейся части двигателя (якоре), и щеточно-коллекторный узел, преобразующий знакопостоянное напряжение на внешних зажимах в переменную ЭДС обмотки якоря.
Магнитная система двигателей постоянного тока включает в себя станину, главные полюса и якорь. Магнитная система может быть с постоянными магнитами и с электромагнитами. Массовое применение в промышленности нашли ДПТ с электромагнитами. Ниже речь идет о таких двигателях.
Станина имеет вид полого цилиндра и выполняется из чугуна или стали.
Главные полюса имеют вид буквы «Т» с вогнутой северху горизонтальной частью, повторяющей форму цилиндрического ротора. Причем эта часть называется полюсным наконечником, а вертикальная ножка – сердечником. На сердечнике наматывается обмотка возбуждения. Главные полюса выполняются шихтованными и набираются из листовой электротехнической стали толщиной в доли миллиметра. Они расположены внутри станины и прикреплены к ней с помощью болтов. Для повышения энергоэффективности и улучшения КПД станина и полюса могут выполняться шихтованными и представлять собой набор фасонных пластин.
Якорь имеет вид цилиндра и выполняется шихтованным. Пакет стали якоря напрессовывается на вал. По наружной цилиндрической поверхности якоря выполняются пазы, в которые укладываются проводники обмотки якоря.
Коллектор имеет вид цилиндра, набранного из медных пластин трапецеидального сечения. К пластинам припаиваются или привариваются концы секций обмотки якоря. Щетки представляют собой прямоугольные параллелепипеды и выполняются из проводящих материалов на основе графита. Щетки закреплены на станине и соединены электрически с выводами, расположенными в коробке на корпусе двигателя.
Двигатели постоянного тока бывают с независимым, последовательным, параллельным и смешанным возбуждением. Примером ДПТ с независимым возбуждением являются двигатели серий MM и MAG производства MAGNETIC.
Способы регулирования скорости ДПТ с независимым возбуждением
На рис. 1… 3 представлены электромеханические характеристики двигателя постоянного тока с независимым возбуждением – зависимость скорости вращения от тока якоря. Распространенной задачей при выполнении технологических операций является регулирование скорости ДПТ. Скорость двигателя постоянного тока с независимым возбуждением может регулироваться следующими тремя способами:
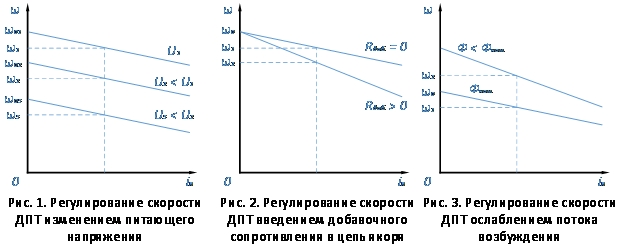
1. Изменение питающего напряжения позволяет изменить скорость идеального холостого хода, не меняя наклона электромеханической характеристики. При этом способе электромеханическая характеристика смещается параллельно самой себе, обеспечивая наибольший диапазон регулирования и наилучшие энергетические характеристики. Для изменения напряжения якоря нужен источник регулируемого напряжения.
2. Изменение сопротивления якорной цепи добавлением последовательно включенного реостата изменяет наклон характеристики при сохранении скорости идеального холостого хода. Данный способ вытесняется первым в связи со ступенчатостью регулирования и низкими энергетическими характеристиками из-за рассеивания энергии в сопротивлении реостата.
3. Увеличение магнитного потока вызывает насыщение магнитной системы, поэтому не применяется. Ослабление магнитного потока вызывает увеличение скорости идеального холостого хода и может быть использовано для работы на низких моментах нагрузки. Преимуществом регулирования тока возбуждения является то, что величина этого тока на двигателях средней и большой мощности в десятки раз меньше тока якоря, что позволяет использовать для регулирования скорости приводы меньшей мощности. Однако, диапазон регулирования скорости при этом способе меньше, чем при первом. Ослабление магнитного потока используют для расширения диапазона регулирования скорости совместно с изменением питающего напряжения.
Устройства для регулирования скорости ДПТ
Для регулирования скорости ДПТ разработаны различные электронные устройства, выполняющие не только основную задачу, но и обеспечивающие дополнительный функционал: защиты двигателя, автоматическую настройку под конкретный двигатель, измерение параметров, контроль режимов, выдачу предупредительной и аварийной сигнализации, управление вспомогательными устройствами. Хорошо освоенными являются тиристорные приводы с аналоговой или цифровой управляющей частью. Примерами первых являются приводы SLE, вторых – PL (двухквадрантный) и PLX (четырехквадрантный) производства Sprint-Electric.
Применение аналоговой управляющей части обеспечивает экономически эффективное решение для простых применений, где не требуется реверса двигателя приводного механизма. В этом случае импульсы управления формируются на основании сигналов задания и обратной связи, проходящих только через аналоговый тракт привода. Похожим образом обрабатываются сигналы для различных защит двигателя. Быстродействие привода обусловливается постоянными времени внутренних фильтров сигнала, а отсутствие встроенной программы позволяет использовать его в приложениях с повышенными требованиями к надежности.
Цифровая управляющая часть добавляет функционал, но и цена привода увеличивается. В этом случае обработку внешних сигналов в цифровой форме выполняет встроенный контроллер с интегрированным программным обеспечением, которое может быть более гибко сконфигурировано под конкретную задачу. Зачастую производители совершенствуют программное обеспечение своих изделий, выпуская так называемые «прошивки», расширяющие функционал готовых устройств. В аналоговых приводах расширить функционал готового устройства можно только изменением внешнего по отношению к приводу оборудования.
Типы датчиков обратной связи по скорости
Для регулирования скорости служат так называемые датчики обратной связи. Сигнал с них при необходимости заводится в привод, представляя реальную скорость механизма. Это позволяет системе управления внести коррекцию в работу привода в случае отклонения желаемой скорости от заданной. Датчики скорости бывают аналоговыми, цифровыми и аналого-цифровыми или комбинированными.
Аналоговые датчики скорости – это тахогенераторы и резольверы. Тахогенератор представляет собой электрическую машину постоянного тока, ЭДС которой в рабочем диапазоне параметров пропорциональна скорости вращения вала. Внешнее питание тахогенератору не требуется. Резольвер является вращающимся трансформатором, амплитуда выходного напряжения которого зависит от входного напряжения и угла поворота ротора.
Цифровые датчики положения (энкодеры), используемые в качестве датчиков скорости, могут быть абсолютными и относительными. Абсолютные энкодеры и при пропадании и последующем восстановлении питания позволяют узнать текущее положение ротора. Относительные (инкрементальные) энкодеры позволяют определить только относительное положение при вращении ротора, выходным сигналом относительного энкодера являются два сдвинутых на четверть периода импульса и импульс нулевого положения. Сдвиг на четверть периода позволяет определить направление вращения, а импульс нулевого положения используется, например, для подсчета числа оборотов.
Абсолютные энкодеры бывают с выходным протоколом, который позволяет, кроме получения информации о положении ротора, изменять характеристики энкодера, проводить его диагностику и калибровку. Различными производителями поддерживается часть или все из представленных протоколов: SSI, BiSS interface, ISI, Profibus, Profinet, Ethernet Powerlink, EtherNet TCP/IP, Modbus, DeviceNet, CANopen, EtherCAT, Endat and Hiperface. Наиболее распространены SSI и Endat.
Комбинированные энкодеры помимо сигналов протокола выдают также импульсы относительного положения или сигналы фаз для работы сервосистем.
Построение системы управления двигателем постоянного тока на базе PL\PLX
Рассмотрим пример построения системы управления ДПТ на примере привода постоянного тока PL\PLX. На рис. 4 представлена схема подключения.
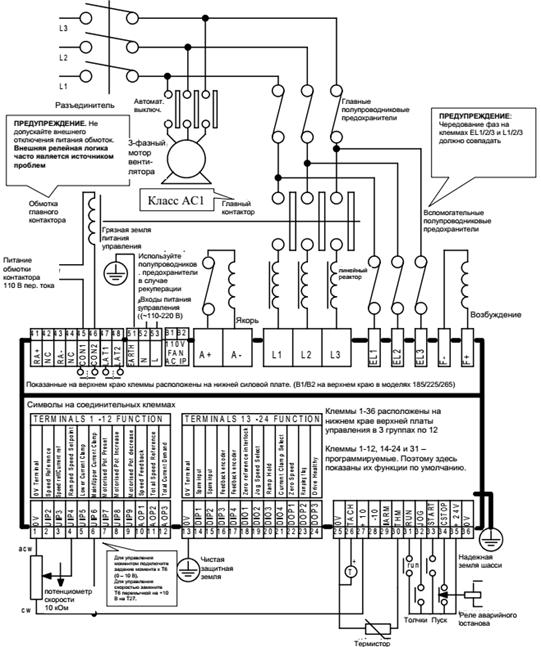
Рис. 4. Пример построения системы управления ДПТ на примере привода постоянного тока PL\PLX
Основными компонентами системы управления ДПТ являются:
1.Привод постоянного тока, который обеспечивает регулирование тока якоря, скорости двигателя, защиты двигателя, управление внешними цепями и обеспечение возбуждения. Существет набор программных функциональных блоков, позволяющих гибко настроить привод под конкретные применения. Привод может быть оснащен модулями поддержки распространенных сетевых протоколов и поддерживает различные типы сигналов обратной связи. При пусконаладке и диагностике устройств на базе PL\PLX удобно использовать встроенную систему диагностики и осциллограф.
2.Главный контактор, назначение которого — физическое отсоединение якоря двигателя от источника питания. К контактору и его цепям управления предъявляются следующие требования: должна быть возможность отключения контактора без использования электроники, контактор не должен размыкать ток и цепь управления контактора должна соответствовать всем требованиям конкретной электроустановки. Блоки PL и PLX спроектированы для выполнения всех этих правил управления главным контактором. Обмотка реле подключена непосредственно к клемме CSTOP (останов по выбегу) T34 и зашунтирована конденсатором, в результате время отключения составляет около 100 миллисекунд. За счет этого у PL\PLX есть время снизить ток якоря до нуля перед размыканием контактов. Убедитесь, что обмотка контактора оснащена гасящим устройством.
3.Главные полупроводниковые предохранители. Они служат для защиты сети от пробоя тиристоров и для защиты привода от замыкания на стороне выпрямленного напряжения. Предохранители в цепи якоря нужны для защиты привода, у которого есть возможность рекуперации энергии в сеть – PLX. Необходимо учитывать рекомендации по приводам для правильного выбора предохранителей по величине I²T.
4.Линейный реактор, который сглаживает ток и уменьшает гармонические искажения напряжения питающей сети. Кроме того, индуктивность реактора позволяет компенсировать низкую индуктивность обмотки якоря и улучшить таким образом коммутацию тиристоров. Еще одной немаловажной функцией реактора является ограничение тока при коротких замыканиях на стороне якоря.
Распространенные вопросы при проектировании систем с приводами постоянного тока
1.Можно ли размыкать цепь питания катушки управления главного контактора кнопкой аварийного останова?
— Нет. Важно, чтобы привод сам контролировал главный контактор и не было другого внешнего воздействия на эту цепь. Аварийный останов должен быть подключен к клемме 34, останов выбегом (coast stop). Однако, если местные указания безопасности требуют необходимости разрыва цепи питания катушки главного контактора кнопкой аварийного останова, необходимо по крайней мере подать сигнал с блок-контакта контактора на клемму 31, пуск (run), чтобы привод имел возможность снизить ток перед отключением питания силового моста.
2.Необходимо ли использовать полупроводниковые предохранители?
— Безусловно, да. Это единственный способ защитить мост привода в случае сбоя в любом месте системы, и это гарантийное условие для привода. На рынке существуют определенные типы выключателей, которые, как утверждается, достаточно быстры для защиты полупроводников, но нам еще предстоит найти тот, который обеспечивает такую же защиту, как и корректно подобранный предохранитель. Стоит отметить, что максимальный номинальный ток предохранителя имеет второстепенное значение, в то время как он довольно велик, — предел тока привода и алгоритм блокировки достаточно сложны, чтобы защитить от повреждения при длительной перегрузке. Важной характеристикой предохранителей является величина I²T. Выраженный в A²с (амперы в квадрате, помноженные на секунды), это мера пропускания энергии, и максимально допустимое значение для любого привода приведено в таблице номиналов предохранителей в руководстве на привод. По сути, если величина I²T не указана в спецификации производителя плавких предохранителей, они вряд ли будут достаточными, даже если в описании производителя используется альтернативное имя, такое как «сверхбыстрый». Предохранитель по стороне переменного тока является обязательным во всех случаях, в то время как предохранители по стороне постоянного тока необходимо устанавливать только в системах, где возможна рекуперация энергии в сеть. Что касается предохранителей в цепи постоянного тока, следует соблюдать особую осторожность, т.к. применение для этих цепей предохранителей переменного тока даже с правильным значением I²T недопустимо.
3.Как сделать ослабление поля?
— Этот вопрос обычно сопровождается утверждением о том, что он оказался трудным и / или занимающим много времени на старых приводах. С цифровым приводом это сделать просто. Если вы правильно установили параметры BASE SPEED и TOP SPEED в CHANGE PARAMETERS, CALIBRATION и помните, что вы должны использовать либо тахогенератор, либо обратную связь с энкодером (ослабление поля не может работать только с обратной связью напряжения якоря), все, что вам нужно сделать, это перейти к CHANGE PARAMETERS, FIELD CONTROL, FIELD WEAKENING MENU, FIELD WEAKENING ENABLE и установить его в ENABLED. Этого будет достаточно в большинстве случаев. Для некоторых двигателей требуется профилирование тока якоря, чтобы улучшить коммутацию в области слабого поля, эту информацию следует запрашивать у производителей двигателей. Относящиеся к этому случаю параметры находятся в CHANGE PARAMETERS, CURRENT CONTROL, I DYNAMIC PROFILE.
Ведущий технический специалист ООО «Драйвика» Образцов П.С.
Источник
Эту 2 привод постоянного двигателя
Электродвигатели, работающие на постоянном токе не так уж и редко встречаются в домашнем хозяйстве. Так они стоят почти во всех детских игрушках, работающих от батареек, которые ходят, бегают, ездят, летают и т. п. Встречаются с двигателями постоянного тока и взрослые – все дрели, перфораторы, болгарки и т.п. механизмы имеют в своей основе электродвигатель постоянного тока. Так же электродвигатели постоянного тока устанавливаются в автомобилях — в вентиляторах и различных приводах. Именно двигатели постоянного тока почти всегда используются на электротранспорте. А вот в производстве их применение сегодня становится редким явлением. Почему?
В немалой мере виной этому недостатки двигателей постоянного тока, как-то: сложность изготовления, высокая стоимость, большие затраты на обслуживание и ремонт.
 Однако, у двигателей постоянного тока есть и существенные плюсы. Так они хорошо поддаются регулировке. Имеют отличные пусковые свойства. А также, — что иногда критично важно – частоты их вращения могут быть более 3000 об/мин.
Однако, у двигателей постоянного тока есть и существенные плюсы. Так они хорошо поддаются регулировке. Имеют отличные пусковые свойства. А также, — что иногда критично важно – частоты их вращения могут быть более 3000 об/мин.
Т.е. в отличии от стандартного асинхронного двигателя с фиксированной базовой (номинальной) частотой вращения (синхронные скорости 3000/1500/1000/. об/мин на 50 Гц), двигатель постоянного тока может быть спроектирован с базовой частота вращения в диапазоне примерно от 300 до 4000 об/мин для каждой рабочей точки.
Что это значит? А значит то, что двигатель постоянного тока оказывается выгоднее асинхронного при продолжительной работе на низких скоростях и для широкого диапазона скоростей при постоянной мощности. Следовательно, говорить о полной замене двигателей постоянного тока асинхронными двигателями пока не приходится. Более того, в каждом конкретном случае надо смотреть и просчитывать, что выгоднее – замена двигателя постоянного тока на асинхронный, модернизация первого двигателя, смена привода или что-то еще.
Для того, чтобы помочь разобраться в этом вопросе давайте посмотрим внимательнее на факторы выбора электродвигателей постоянного и переменного тока.
Основные факторы выбора электродвигателя постоянного или переменного тока
Как уже отмечалось, сегодня довольно распространенной точкой зрения о двигателях постоянного тока является следующая: двигатели постоянного тока сложные, требующие частого обслуживания, что делает их эксплуатацию дорогой. К тому же они имеют низкую степень защиты. А вот двигатели переменного тока (асинхронные двигатели) наоборот просты и надежны, не нуждаются в обслуживании, имеют более низкую цену, и кроме того более высокую степень защиты.
Но так ли это? Увы, если дело касается простых применений, то данная доминирующая оценка в целом верна. Но вот в других случаях, данное утверждение может и не соответствовать истине.
В принципе все зависит от критериев выбора, по которым собственно и выбирают электродвигатель и компоненты управления им. Если «не растекаться мыслью по древу», то главные критерии выбора здесь следующие:
- Стоимость двигателя и требуемого дополнительного оборудования в отношении к предполагаемой прибыли получаемой с его помощью. Данный критерий может быть назван бизнес-критерием, поскольку в его основе по сути лежит не чисто экономическая целесообразность (последняя достаточно многопланова), а такой ее момент как финансовая составляющая или точнее возможная окупаемость.
И здесь очевидно, что если время окупаемости, например, электродвигателя постоянного тока превышает возможную прибыл полученную от него, то его применение является нецелесообразным и требует поиска более дешевого решения, каковым и может стать применение асинхронного двигателя. При этом понятно, что ситуация, когда прибыль не покрывает возможность использования и более дешевого решения является патовой, а потому не рассматривается. Другое дело, что нередко внешне более дешевое решение на деле может стать более дорогим. Но это вопрос уже к качеству менеджмента на предприятии и его умения вычислять не только финансовую составляющую, но и более сложную экономическую.
- Эксплуатационные расходы, как-то затраты на обслуживание, производственные издержки, КПД и т.п., расходы на содержание производственных площадей, т.е. все то, что уже входит в более широкую экономическую составляющую использования оборудования, о которой упоминалось выше.
- Технологические аспекты, а именно — динамический отклик, время разгона, возможность аварийного стопа и т.д., в том числе и массогабаритные характеристики движка. Сюда же можно отнести факторы эксплуатационной надежности, соответствия международным требованиям и стандартам и т.д.
- Еще одним фактором последних лет является экологический аспект, связанный с воздействиями на внешнюю среду.
Различия между двигателями постоянного и переменного тока
Таким образом, очевидно, что, когда возникает вопрос о том, стоит ли модернизировать существующий привод постоянного тока или дешевле его полностью заменить на электропривод переменного тока, надо подойти к этому вопросу взвешенно и рассмотреть все аргументы «за» и «против».
 Так, еще раз отметим, что сравнение рабочих характеристик двигателей показывает, что двигатель постоянного тока выгоднее асинхронного при продолжительной работе на низких скоростях. Не зря типичные применения, требующие обеспечение постоянного момента в широком диапазоне скоростей — это волочильные станы, поршневые компрессоры, подъемные механизмы, канатные дороги, экструдеры, намоточные устройства и т.п.
Так, еще раз отметим, что сравнение рабочих характеристик двигателей показывает, что двигатель постоянного тока выгоднее асинхронного при продолжительной работе на низких скоростях. Не зря типичные применения, требующие обеспечение постоянного момента в широком диапазоне скоростей — это волочильные станы, поршневые компрессоры, подъемные механизмы, канатные дороги, экструдеры, намоточные устройства и т.п.
К тому же двигатели постоянного тока имеют значительно меньшую высоту оси вращения и массу ротора, чем асинхронные двигатели, и, следовательно, обладаю более низким моментом инерции ротора, что является существенным преимуществом в высокодинамичных применениях, таких как испытательные стенды, летучие ножницы, и реверсивные приводы, так как это влияет на время разгона и динамический отклик двигателя в 4-х квадрантных приложениях (в двигательных и тормозных режимах).
Нельзя не заметить, что электродвигателю постоянного тока присущ широкий диапазон скоростей при постоянной мощности (работа с ослаблением поля или диапазон регулировки возбуждения). А это означает, что для специализированных приводных приложений таких, как привод намотчика и размотчика, испытательный стенд, лебедка и т.д., где требуется очень широкий диапазон скоростей при постоянной мощности, двигателю постоянного тока пока нет альтернативы.
При этом, постоянная «головная боль» при эксплуатации двигателей постоянного тока – щетки, сегодня если и не уходит в прошлое, то становится значительно меньше. И то сказать, в настоящее время, в зависимости от сложности приложения, ресурс щеток двигателя постоянного тока составляет, примерно, 7000 . 12000 часов, благодаря современному коллекторному узлу, углеродистым щеткам и оптимизированному полю возбуждения.
 С другой стороны, исторически сложилось так, что, начиная с 20-х годов ХХ века, двигатели постоянного тока разрабатывались в основном для регулируемых приводов. Это обусловило применение в них внутренней форсированной независимой вентиляции (прим. в 85 % двигателей до 250 kW). В тоже время, стандартные асинхронные двигатели, которые активно начали применяться в 70-80-хх годах ХХ века и в большинстве своем (примерно до 90 % до 250 kW) производились с поверхностной самовентиляцией, поскольку частотно-регулируемые приводы тогда не были широко распространены. А это привело к тому, что фактически все асинхронные двигатели мощностью, прим. до 1400 kW имеют степень защиты IP 54, как стандарт, благодаря их простой и прочной конструкции.
С другой стороны, исторически сложилось так, что, начиная с 20-х годов ХХ века, двигатели постоянного тока разрабатывались в основном для регулируемых приводов. Это обусловило применение в них внутренней форсированной независимой вентиляции (прим. в 85 % двигателей до 250 kW). В тоже время, стандартные асинхронные двигатели, которые активно начали применяться в 70-80-хх годах ХХ века и в большинстве своем (примерно до 90 % до 250 kW) производились с поверхностной самовентиляцией, поскольку частотно-регулируемые приводы тогда не были широко распространены. А это привело к тому, что фактически все асинхронные двигатели мощностью, прим. до 1400 kW имеют степень защиты IP 54, как стандарт, благодаря их простой и прочной конструкции.
Отсюда неудивительно, что для эксплуатации в зонах с повышенной опасностью, сегодня практически исключительно используются взрывозащищенные асинхронные двигатели. Другими словами, асинхронный двигатель сумел отыграть для себя ведущую позицию и доказал свою эффективность в тех секторах промышленности, которые характеризуются агрессивными условиями окружающей среды, высокой степенью загрязненности и запыленности.
Впрочем, необходимо заметить, что все плюсы и минусы электродвигателей не исчерпываются только их собственными эксплуатационными характеристиками. Немалую роль здесь играет и специфика преобразователей, применяемых при эксплуатации электродвигателей.
Специфика приводов постоянного и переменного тока в промышленном применении
Современное развитие технологий таково, что преобразователи на базе микропроцессоров (применяемые как в приводах переменного, так и постоянного тока) в настоящее время достигли очень высокого технического уровня. Причем в немалой мере именно достигнутый уровень преобразователей переменного тока привел сегодня к тому, что в большинстве промышленных приложений электропривод переменного тока используется там, где раньше безальтернативно применялся привод постоянного тока.
 Однако, традиционный привод постоянного тока (1-но и 4-х квадрантный) продолжает играть важную роль, особенно в тех приложениях, где нужно обеспечить высокодинамичные режимы с постоянным моментом вращения, жесткими требованиями по перегрузочной способности в широком диапазоне скоростей и рекуперацию энергии обратно в сеть.
Однако, традиционный привод постоянного тока (1-но и 4-х квадрантный) продолжает играть важную роль, особенно в тех приложениях, где нужно обеспечить высокодинамичные режимы с постоянным моментом вращения, жесткими требованиями по перегрузочной способности в широком диапазоне скоростей и рекуперацию энергии обратно в сеть.
 Однако, традиционный привод постоянного тока (1-но и 4-х квадрантный) продолжает играть важную роль, особенно в тех приложениях, где нужно обеспечить высокодинамичные режимы с постоянным моментом вращения, жесткими требованиями по перегрузочной способности в широком диапазоне скоростей и рекуперацию энергии обратно в сеть.
Однако, традиционный привод постоянного тока (1-но и 4-х квадрантный) продолжает играть важную роль, особенно в тех приложениях, где нужно обеспечить высокодинамичные режимы с постоянным моментом вращения, жесткими требованиями по перегрузочной способности в широком диапазоне скоростей и рекуперацию энергии обратно в сеть.Кроме того, коммутация в преобразователях частоты происходит с большой частотой и в выходном напряжении появляется высокочастотная составляющая, в силу чего могут возникнуть проблемы с электромагнитной совместимостью.
В преобразователях постоянного тока есть только один контур преобразования энергии. В преобразователях частоты два контура преобразования энергии. А это значит, что потери мощности удваиваются по сравнению с приводами постоянного тока. При этом потери мощности, полученные эмпирическим путем следующие: ППТ — 0.8 % . 1.5 % от номинальной мощности; ЧРП — 2 % . 3.5 % от номинальной мощности.
Место, требуемое для размещения шкафа преобразователя мощностью от 100 kW: ППТ — 100 %, ЧРП — 130 % . 300 %. Это преимущество приводов постоянного тока обуславливает уменьшение размера и стоимости электрошкафа и системы охлаждения.
К чему это приводит? К тому, что при критичности размеров иногда выгоднее оказывается применять двигатель постоянного тока с соответствующим приводом.
Впрочем, в каждом конкретном случае факторов модернизации приводов постоянного тока реально больше и степень их значимости также различна.
Модернизация существующих приводов постоянного тока
Вообще нельзя не заметить, что, когда У Вас возникает вопрос о том, стоит ли модернизировать существующий привод постоянного тока или дешевле его полностью заменить на электропривод переменного тока, очевидно, что «пороть горячку» смысла не имеет. В любом случае надо подойти к этому вопросу взвешенно и рассмотреть все аргументы и «за» и «против», оценить степень их значимости и возможные последствия.
И здесь надо четко понимать, что когда мы говорим о модернизации приводов постоянного тока, то здесь реально доступно несколько уровней модернизации:
Во-первых, кардинальная модернизация с полной заменой замена всей приводной системы на частотно-регулируемый привод.
Во-вторых, полная модернизация с заменой всей системы привода постоянного тока, включающей в себя и преобразователь и двигатель на новый современный привод постоянного тока.
Во-третьих, неполная модернизация с заменой только преобразователя, если сам двигатель в хорошем состоянии.
В-четвертых, частичная модернизация с заменой одного из модулей преобразователя на новый.
В-пятых, частичная модификация с заменой аналоговой управляющей электроники на цифровую без изменения силовой части. Впрочем, она рекомендуется только на мощностях более 1 МВт.
При этом отвечая себе на вопрос, о том какой подход выбрать в каждом конкретном случае, важно оценить ряд критериев:
1) Может ли появиться потребность в изменении привода в будущем, т.е. изменяться тип или характер нагрузки, условия эксплуатации, и т.д.?
2) В каком состоянии находятся индивидуальные компоненты системы, исходя из их надежности, возраста, эксплуатационных затрат?
Так же до принятия решения о замене привода постоянного тока на ЧРП надо обязательно учитывать следующие пункты:
— издержки на прокладку новых кабелей;
— дополнительное место для размещения преобразователя частоты;
— потребуется ли замена коммутационной аппаратуры;
— возможность и сложность механического монтажа нового двигателя;
— продолжительность всех работ по замене приводов.
Кроме того, здесь также можно попытаться ответить на следующие вопросы:
Должен быть обеспечен режим работы в 4-х квадрантах с рекуперацией?
Предполагается ли продолжительная работа на низкой скорости?
Требуется ли меньшее выделение тепла преобразователем?
Предполагаются ли частые динамичные разгоны и торможения?
Требуется ли широкий диапазон скоростей при постоянной мощности (> 1:1.5)?
Устраивает степень защиты двигателя 15 kW → ППТ менее дорогие
Причем сравнение двух типов приводных систем, сделанное в данном обзоре, показывает, что вопрос о том, является ли правильным выбор привода постоянного или переменного тока, целиком зависит от конкретного применения. А оно бывает часто весьма различным и не всегда определяется только технологическим аспектами. Главное, чтобы в этом вопросе некие желания, сформированные на основе непонятно какого мнения, не перевешивали технологические аспекты и экономическую выгоду.
Привод постоянного тока siemens
Допустим, что Вы все просчитали и у Вас есть не только бизнес-план, но и четкое технологическое видение проблемы модернизации Вашего производства и оно, это видение, говорит Вам, что кардинальная модернизация с полной заменой замена всей приводной системы на частотно-регулируемый привод в данном конкретном случае Вам не нужна, а нужно что-нибудь из второго, третьего и других указанных выше пунктов модернизации. Что делать в этом случае?
Будь у нас на рынке один-два производителя – все было бы просто. Но, к сожалению, а может и к счастью их не так уж мало.
Что же делать в этом случае?
В принципе тоже, что и ранее — взвешенно и рассмотреть все аргументы, исходя из факторов:
— соотношение цены и качества;
— технологической целесообразности для Вашего конкретного технологического процесса.
Ну и главное, обратите внимание на самого производителя. Очевидно, что, если Вы хотите работать на рынке без эксцессов достаточно долго, то гнаться за дешевыми аналогами мировых брендов вряд ли стоит. И в этом плане стоит все же присмотреться именно к самим брендам. А также к тем фирмам, которые их продают – обладают ли они статусом инжиринговой компании, могут ли помочь в выборе и последующем обслуживании приводов?
И вот в этом случае, мы предлагаем Вам рассмотреть использование многопроцессорного электропривода постоянного тока Sinamics DC Master, который представляет собой довольно качественное и высокотехнологическое решение от известной компании Siemens для регулирования и контроля технологическими приложениями в области постоянного тока.
Тем более, что построенный на основе единой для современных приводов Siemens платформе Sinamics, электропривод Sinamics DCM объединил в себе достоинства своего очень удачного предшественника Simoreg DC Master и передовые технологии Motion Control.
Нельзя не заметить, что в пользу такого выбора говорит многое и сам по себе бренд Сименс и качество предлагаемых им приводов постоянного тока siemens.
Тем более, что активное использование технологий Motion Control позволило создать Сименсу современное экономичное решение, позволяющее наращивать функциональность системы электропривода Sinamics DCM посредством дополнительных модулей и программного обеспечения лишь в случае необходимости. А то, что это более чем актуально говорит хотя бы пример привода Simoreg DC Master 6RA70, который уже в своей в базовой комплектации включал в себя столь большое количество функциональных возможностей, что, как оказалось, не менее 50% этих возможностей были просто избыточны. А ведь все это было заложено в стоимость оборудования. Теперь же у производителя есть возможность подобрать себе ту конфигурацию, которая ему нужна – не больше, не меньше. А значит и платить только за то, что необходимо.
В немалой мере именно поэтому наша организация сегодня производит постепенный переход на использование современного поколения тиристорных им приводов постоянного тока siemens. При это мы не просто продаем электроприводы, но и обеспечиваем их настройку, наладку и последующее инженерно-техническое сопровождение.
Источник



