
- Запуск старых HDD для прикладных применений
- Как сделать простейший драйвер для двигателя старого HDD
- Схемные особенности
- Изготовление устройства
- Смотрите видео
- Феерическая расстановка точек над HDD motors. Часть 1
- Введение
- Алгоритмы управления
- 1 способ.
- 2 способ.
- 3 способ.
- 4 способ.
- 5способ.
- Обратная связь по положению.
- Технические аспекты.
- Комментарии ( 98 )
Запуск старых HDD для прикладных применений
При использовании старых HDD приводов в прикладных целях иногда возникает проблема с тем, что шпиндельный двигатель останавливается через некоторое время после запуска. Есть у них такая «фишка» — если с блока головок не поступают сигналы на микросхему-контроллер, то она запрещает микросхеме-драйверу вращать двигатель. На примере несколько моделей приводов попробуем разобраться, как это исправить.
Всё началось с того, что привезли несколько старых винчестеров (рис.1) и сказали, что здесь рабочие вперемешку с «убитыми», хочешь – выбирай, не хочешь – делай что хочешь. Но если разберёшься, как их использовать в качестве небольшого наждака для правки инструмента, расскажи. Ну, вот – рассказываю…

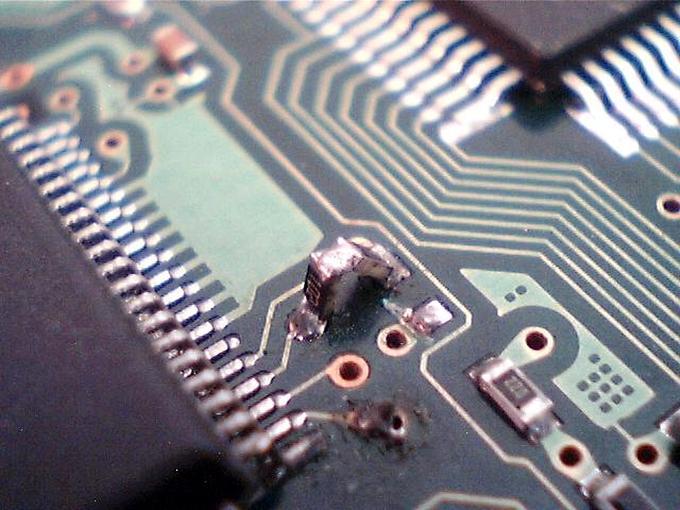
Первый HDD – «Quantum» семейства «Fireball TM» с микросхемой привода TDA5147AK (рис.2). Посмотрим, что он из себя представляет.
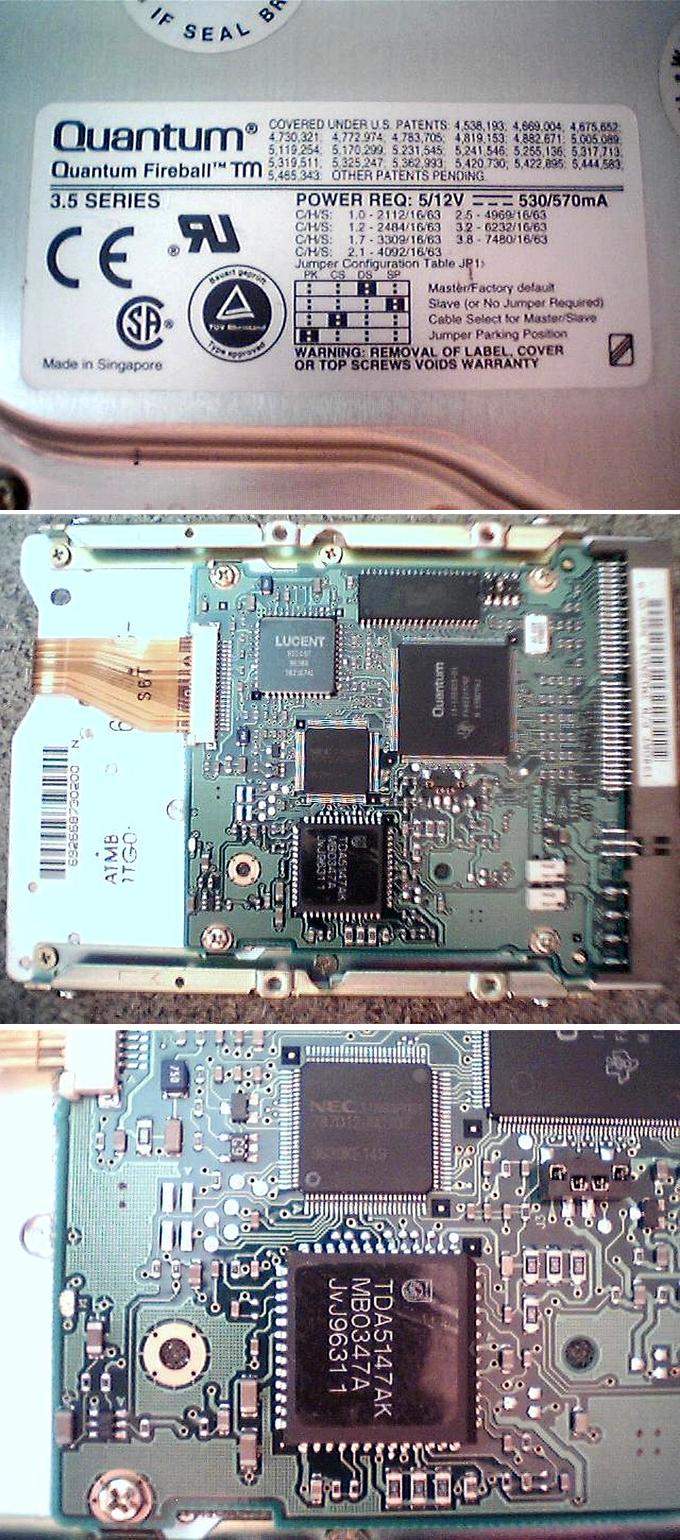
Верхняя крышка крепится 4-мя винтами по углам и одним винтом и гайкой, находящимися сверху, под наклейками. После снятия крышки видны сам жёсткий диск, считывающие головки и магнитная система управления положением головок (рис.3). Шлейф отсоединяем, магнитную систему откручиваем (здесь понадобиться специально заточенный шестигранный ключ «звёздочка»). При желании диск тоже можно снять, если открутить три винта на шпинделе двигателя (также нужен шестигранник).

Теперь ставим крышку на место для того, чтобы можно было перевернуть HDD для экспериментов с электроникой и подаём в разъём питания напряжения +5 В и +12В. Двигатель разгоняется, работает примерно 30 секунд, а затем останавливается (на печатной плате есть зелёный светодиод – он горит при вращении двигателя и мигает при его остановке).
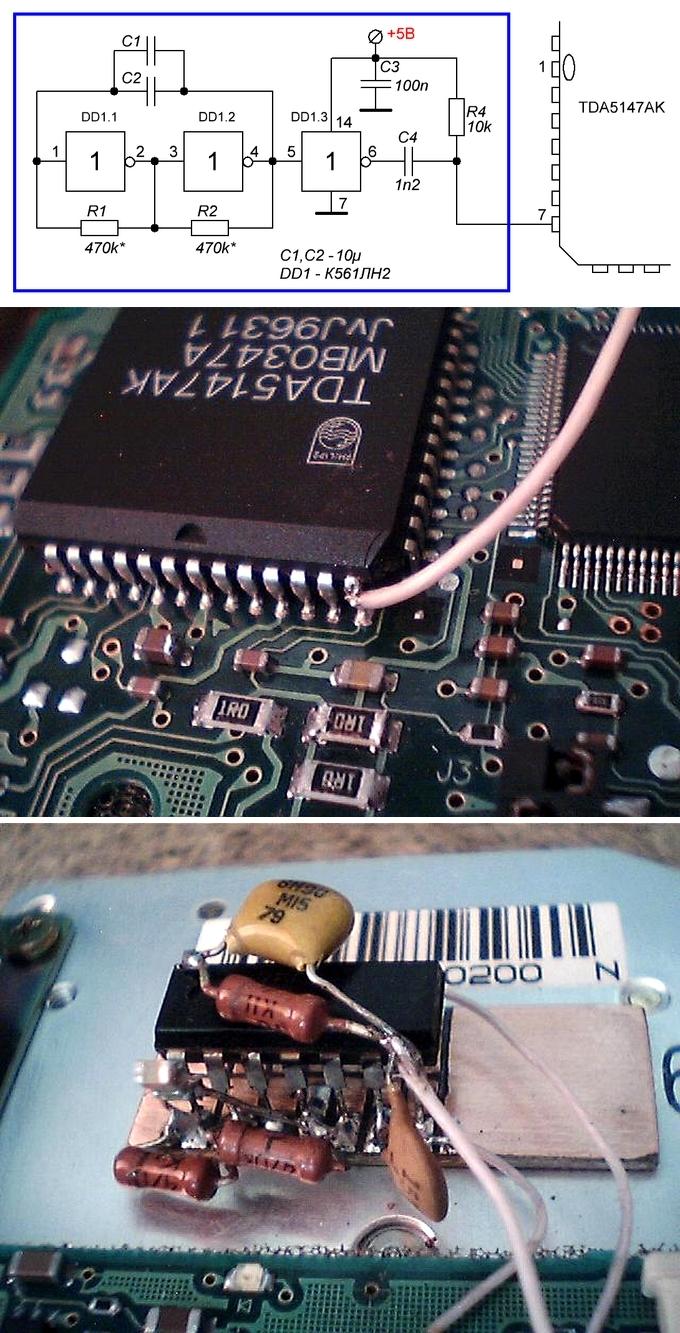
В сети легко находится даташит на микросхему TDA5147K, но по нему не удалось разобраться с сигналом разрешения/запрета вращения. При «подтягивании» сигналов POR к шинам питания добиться нужной реакции не удалось, но при просмотре сигналов осциллографом выяснилось, что при касании щупом 7-го вывода микросхемы TDA5147АK происходит её сброс и перезапуск двигателя. Таким образом, собрав простейший генератор коротких импульсов (рис.4, нижнее фото) с периодом в несколько секунд (или десятков секунд), можно заставить двигатель вращаться более-менее постоянно. Возникающие паузы в подаче питания длятся около 0,5 секунды и это не критично, если двигатель используется с небольшой нагрузкой на валу, но в других случаях это может быть неприемлемо. Поэтому, способ хоть и действенный, но не совсем правильный. А «правильно» запустить его так и не удалось.
Следующий HDD – «Quantum» семейства «Trailblazer» (рис.5).

При подаче напряжений питания привод никаких признаков жизни не подаёт и на плате электроники начинает сильно греться микросхема 14-107540-03. В середине корпуса микросхемы заметна выпуклость (рис.6), что говорит о её явной неработоспособности. Обидно, но не страшно.

Смотрим микросхему управления вращением двигателя (рис.7) — HA13555. Она при подаче питания не греется и видимых повреждений на ней нет. Прозвонка тестером элементов «обвязки» ничего особенного не выявила – остаётся только разобраться со схемой «включения».

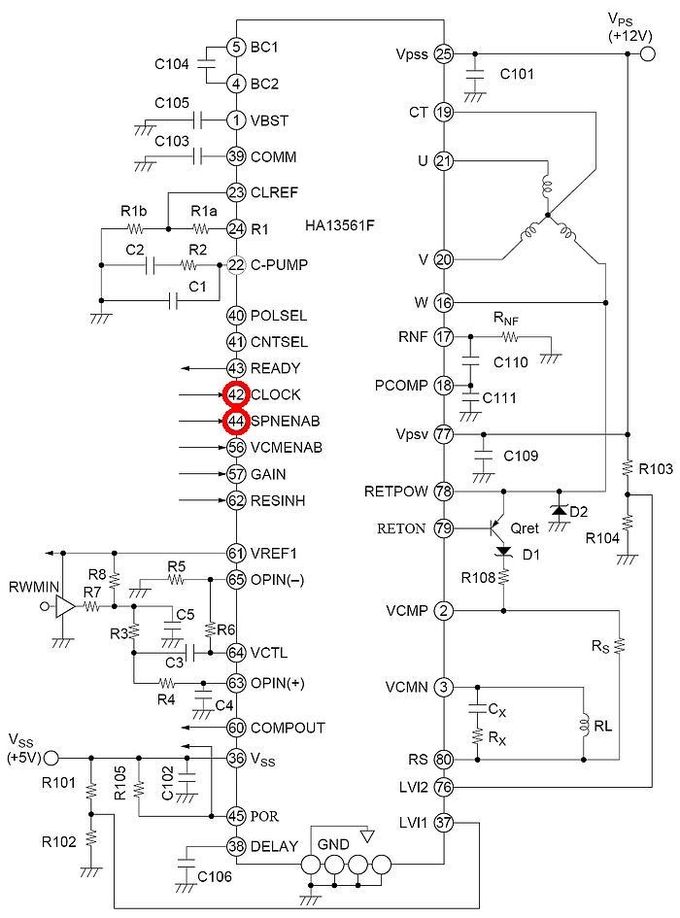
Поисковики даташит на неё не находят, но есть описание на HA13561F. Она выполнена в таком же корпусе, совпадает по ножкам питания и по «выходным» выводам с HA13555 (у последней к проводникам питания двигателя подпаяны диоды – защита от противо-ЭДС). Попробуем определиться с необходимыми выводами управления. Из даташита на HA13561F (рис.8) следует, что на вывод 42 (CLOCK) должна подаваться тактовая частота 5 МГц с уровнем TTL-логики и что сигналом, разрешающим запуск двигателя, является высокий уровень на выводе 44 (SPNENAB).
Так как микросхема 14-107540-03 нерабочая, то отрезаем питание +5 В от неё и от всех остальных микросхем, кроме HA13555 (рис.9). Тестером проверяем правильность «порезов» по отсутствию соединений.
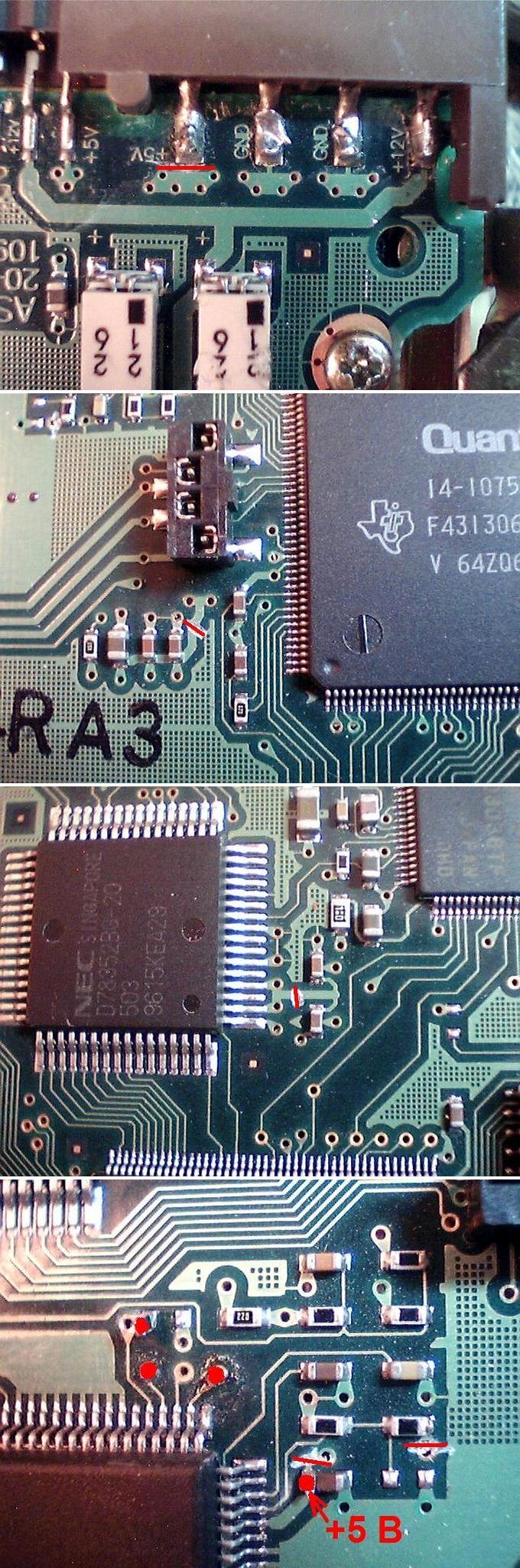
На нижнем фото рисунка 9 красными точками показаны места подпайки напряжения +5 В для HA13555 и резистора «подтяжки к плюсу» её 44 вывода. Если же резистор от вывода 45 снять с родного места (это R105 по рисунку 8) и поставить его вертикально с некоторым наклоном к микросхеме, то дополнительный резистор для подтяжки к «плюсу» вывода 44 можно припаять к переходному отверстию и к висящему выводу первого резистора (рис.10) и тогда питание +5 В можно подавать в место их соединения.
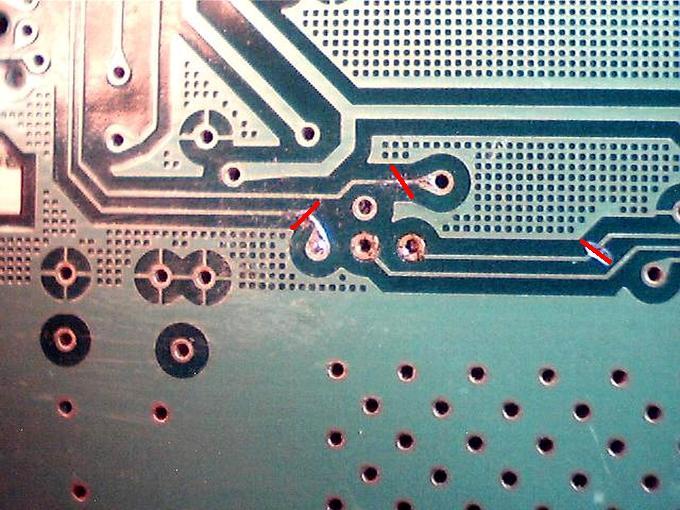
На обратной стороне платы следует перерезать дорожки, как показано на рисунке 11. Это «бывшие» сигналы, приходящие от сгоревшей микросхемы 14-107540-03 и старая «подтяжка» резистора R105.
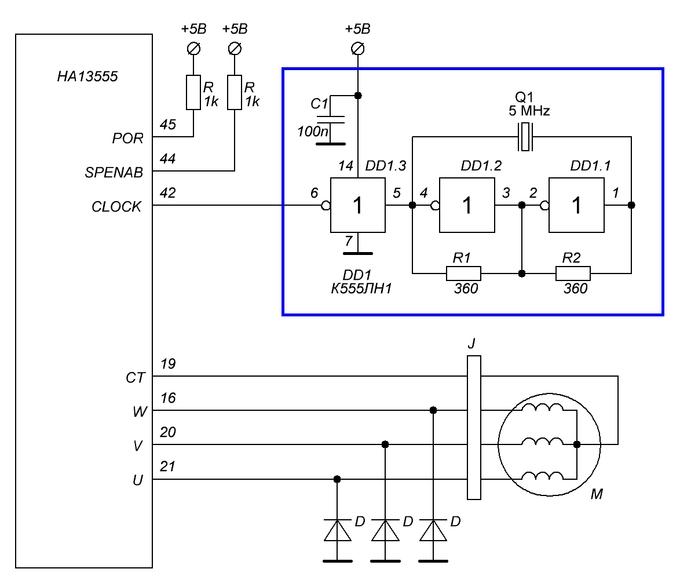
Организовать подачу «новых» тактовых сигналов на вывод 42 (CLOCK) можно с помощью дополнительного внешнего генератора, собранного на любой подходящей микросхеме. В данном случае была использована К555ЛН1 и получившаяся схема показана на рисунке 12.
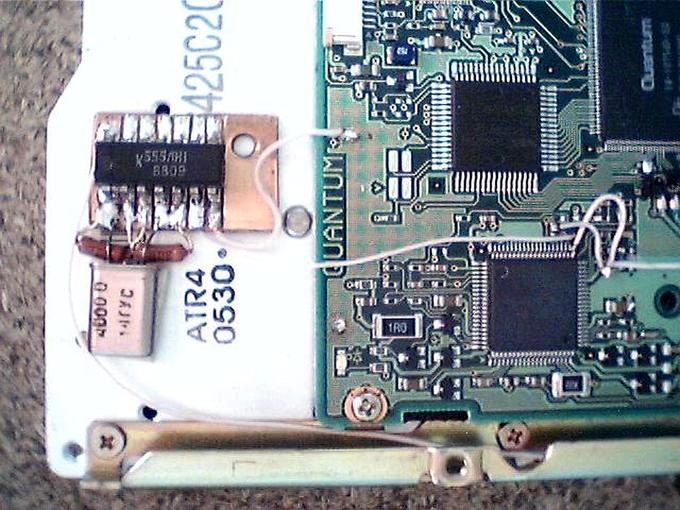
После «прокидывания» проводом МГТФ напряжения питания +5 В прямо от разъёма к выводу 36 (Vss) и других требуемых соединений (рис.13), привод запускается и работает безостановочно. Естественно, если бы микросхема 14-107540-03 была исправна, вся доработка заключалась бы только в «перетяжке» 44-го вывода к шине +5 В.
На этом «винте» была проверена его работоспособность при других тактовых частотах. Сигнал подавался с внешнего генератора прямоугольных импульсов и минимальная частота, с которой привод работал устойчиво — 2,4 МГц. На более низких частотах циклично происходил разгон и остановка. Максимальная частота – около 7,6 МГц, при дальнейшем её увеличении количество оборотов оставалось прежним.
Количество оборотов также зависит и от уровня напряжения на выводе 41 (CNTSEL). В даташите на микросхему HA13561F есть таблица и она соответствует значениям, получаемым у HA13555. В результате всех манипуляций удалось получить минимальную скорость вращения двигателя около 1800 об/мин, максимальную – 6864 об/мин. Контроль проводился с помощью программы SpectraPLUS, оптопары с усилителем и кусочка изоленты, приклеенного к диску так, чтобы он при вращении диска перекрывал окно оптопары (в окне анализатора спектра определялась частота следования импульсов и затем умножалась на 60).
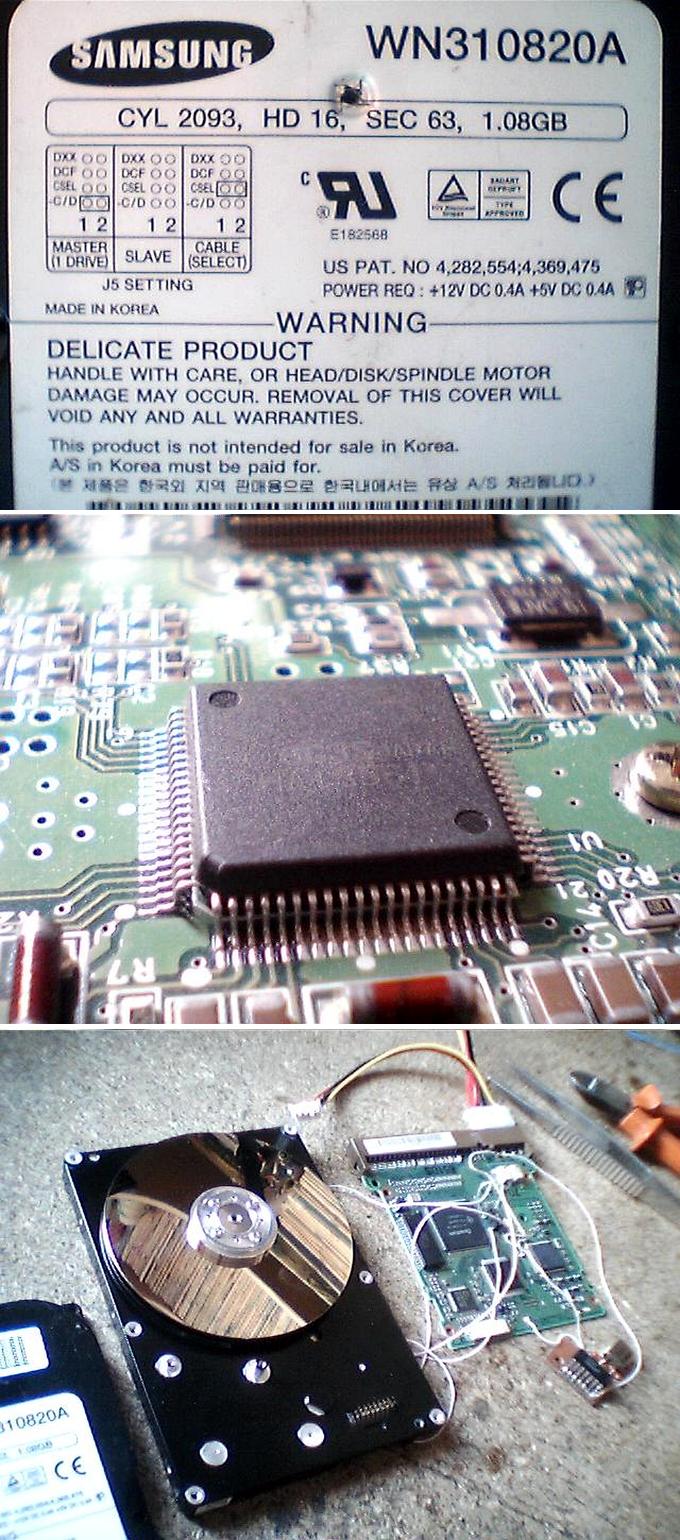
Третий привод – «SAMSUNG WN310820A».
При подаче питания микросхема-драйвер – HA13561 начинает сильно греться, двигатель не вращается. На корпусе микросхемы заметна выпуклость (рис.14), как и в предыдущем случае. Проводить какие-либо эксперименты не получится, но можно попробовать запитать двигатель от платы с микросхемой HA13555. Длинные тонкие проводники были подпаяны к шлейфу двигателя и к выходным контактам разъёма платы электроники – всё запустилось и работало без проблем. Если бы HA13561 была целой, доработка для запуска была бы такой же, как и для «Quantum Trailblazer» (44-й вывод к шине +5 В).
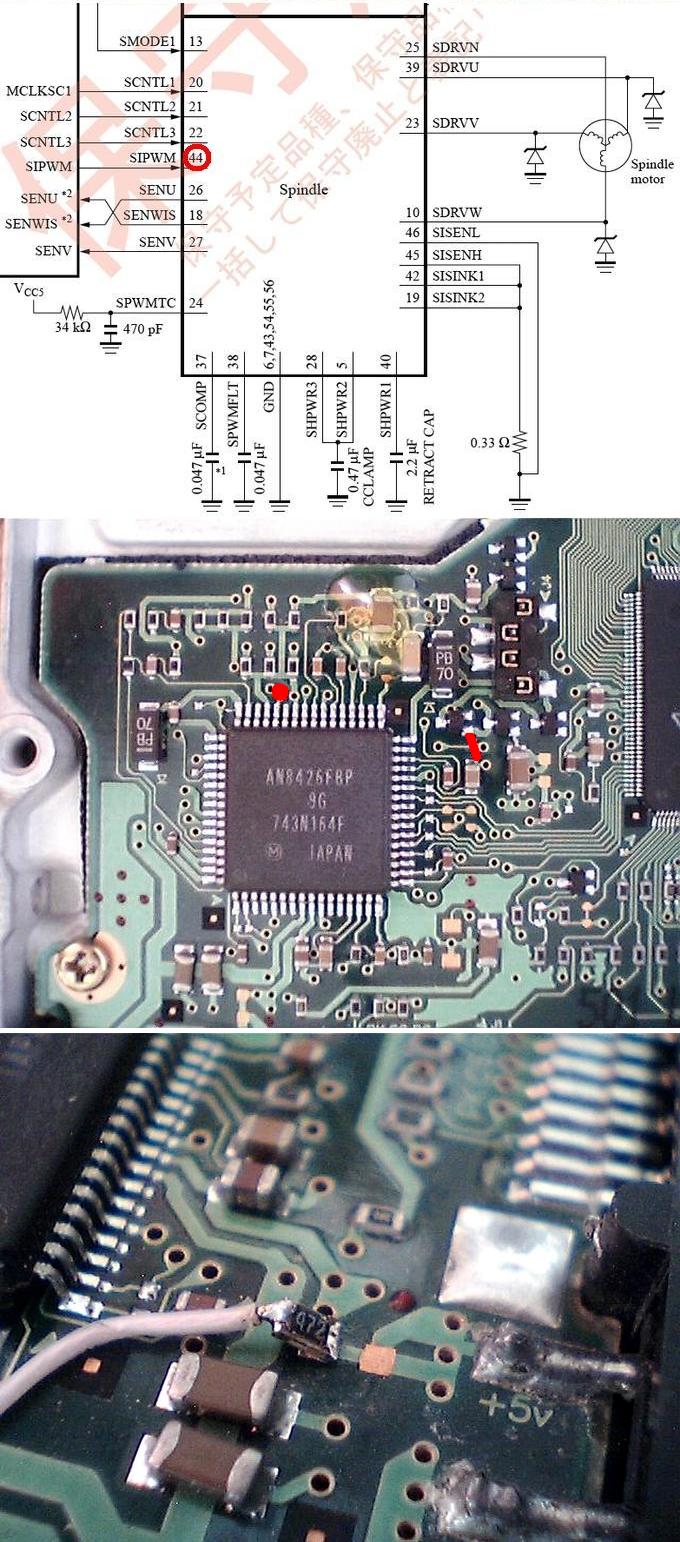
Четвёртый привод — «Quantum» семейства «Fireball SE» с микросхемой привода AN8426FBP (рис.15).

Если отключить шлейф блока головок и подать питание на HDD, то двигатель набирает обороты и, естественно, через некоторое время останавливается. Даташит на микросхему AN8426FBP есть в сети и по нему можно разобраться, что за запуск отвечает вывод 44 (SIPWM) (рис.16). И если теперь перерезать дорожку, идущую от микросхемы 14-108417-02 и «подтянуть» вывод 44 через резистор 4,7 кОм к шине +5 В, то двигатель не будет останавливается.
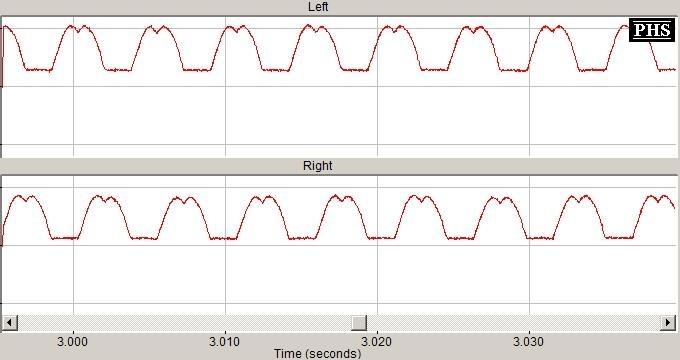
И напоследок, вернувшись немного назад, были сняты формы сигналов на выводах W и V микросхемы HA13555 относительно общего провода (рис. 17).
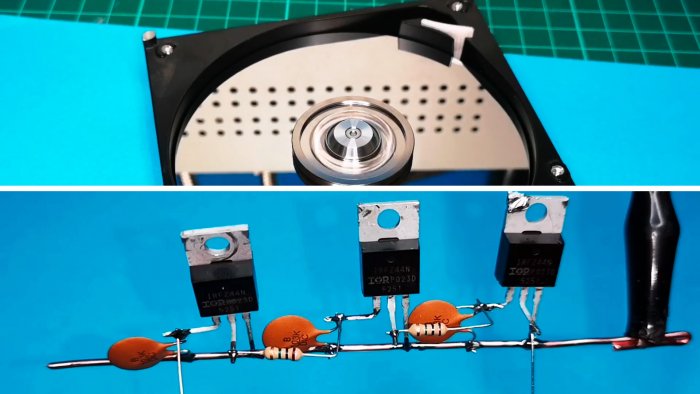
Самое простое прикладное применение старого HDD – небольшой наждак для правки свёрл, ножей, отвёрток (рис.18). Для этого достаточно наклеить на магнитный диск наждачную бумагу. Если «винт» был с несколькими «блинами», то можно сделать сменные диски разной зернистости. И здесь хорошо бы иметь возможность переключения скорости вращения шпиндельного двигателя, так как при большом количестве оборотов очень легко перегреть затачиваемую поверхность.

Наждак, конечно, не единственное применение для старого HDD. В сети легко находятся конструкции пылесосов и даже аппарата для приготовления сладкой ваты…
В дополнении к тексту находятся упомянутые даташиты и файлы печатных плат внешних генераторов импульсов в формате программы Sprint-Layout 5-ой версии (вид со стороны печати, микросхемы устанавливаются как smd, т.е. без сверловки отверстий).
Андрей Гольцов, r9o-11, г. Искитим, апрель 2018.
Источник
Как сделать простейший драйвер для двигателя старого HDD
Устройство представляет собой электронный коммутатор и предназначено для работы с маломощными бесколлекторными (иначе бесщеточными) электродвигателями при условии соединения их обмоток звездой. Типичный пример таких агрегатов — привод дисковода классических винчестерских дисков персональных компьютеров.
Отличается схемной простотой и собирается на недефицитных деталях, которые хорошо представлены в интернет-торговле.
Схемные особенности
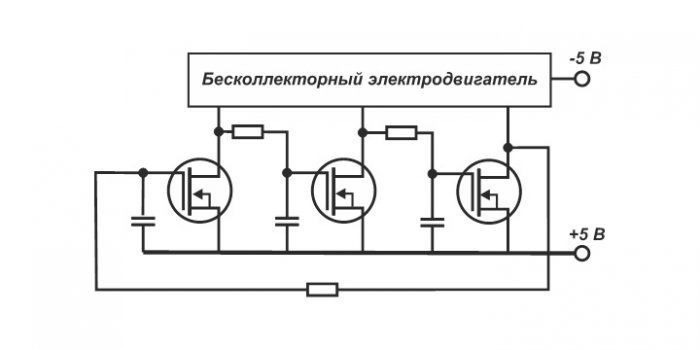
Устройство выполнено по схеме 3-фазного мультивибратора на полевых транзисторах с изолированным затвором, отдельные однотранзисторные каскады которого имеют идентичную структуру и соединены в кольцо. Каждый предыдущий каскад такого кольца управляет функционированием транзистора последующего. Стоки транзисторов соединены с обмотками двигателя напрямую.
Время нахождения транзисторов схемы в активном состоянии определяется последовательной RC-цепочкой, напряжение со средней точки которой подается на затвор.
Принципиальная схема устройства представлена на рисунке.
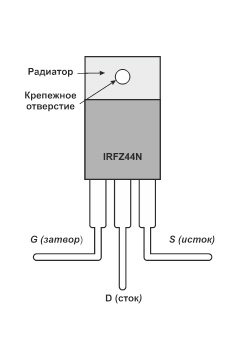
Транзисторы снабжены пластинчатым радиатором, который имеет прямую гальваническую связь со стоком. С учетом невысокой мощности управляемого бесколлекторного электродвигателя необходимость фиксации радиатора на корпусе с низким тепловым сопротивлением отсутствует. Цоколевка и рекомендуемое при сборке направление изгиба выводов представлены на рисунке.
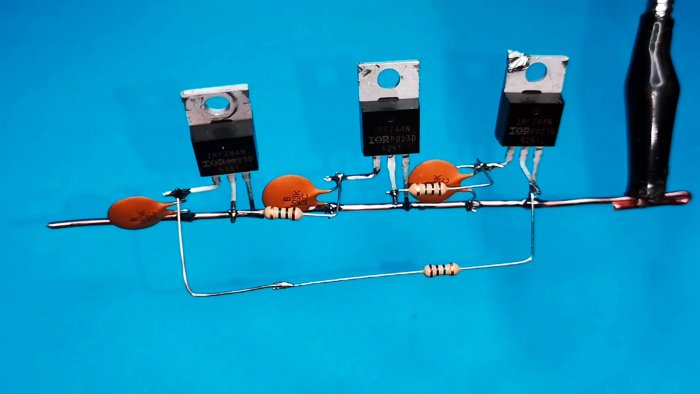
Изготовление устройства
Схема устройства достаточно проста и не требует обязательного применения монтажной платы. С учетом ее рядной структуры в качестве силового несущего элемента может быть использована проволочная шина диаметром 1 – 2 мм, которая соединяется с плюсом источника питания. Общий вывод обмоток подключается на минус источника питания.
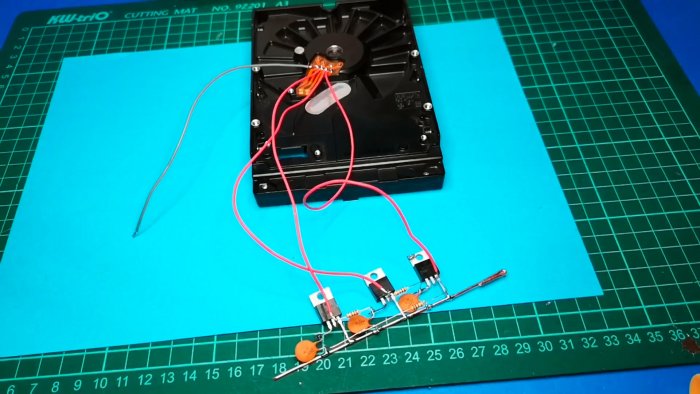
Подключается к трехфазному двигателю жесткого диска с общим проводом.

При сборке необходимо контролировать отсутствие коротких замыканий между отдельными неизолированными соединениями, при необходимости применяют кембрики.
Устройство при отсутствии ошибок в схеме начинает функционировать немедленно после подачи постоянного напряжения. Частоту вращения ротора двигателя можно менять заменой конденсаторов или резисторов, причем все устанавливаемые пассивные компоненты должны иметь одинаковый номинал.
Смотрите видео
Источник
Феерическая расстановка точек над HDD motors. Часть 1

Всем привет! В статье попытаюсь разъяснить основные способы управления двигателем HDD и сходными с ним электрическими машинами. 
Введение
1 ом. 
Алгоритмы управления
Забегая далеко вперёд скажу — идеальным случаем для нашей машины является подача на её фазы 3х синусоид сдвинутых на 120 градусов (как в обычных электрических сетях). Однако в некоторых случаях такая «идеальность» попросту не нужна.
1 способ.
Простой перебор фаз. Необходимо 3 силовых ключа, которые подключают фазы к источнику в порядке АВ-ВС-СА. Такой способ чаще всего встречается в интернете у самодельщиков.
Достоинства :
— простота;
— малое кол-во силовых ключей (3 шт);
— простота организации о\с по противоЭДС;
— меньший вес\габариты, что важно в rc моделизме.
Недостатки:
— большой ток через ключи;
— электромагнитный момент пульсирует и далёк от идеала (насыщен высшими гармониками). В итоге – стабильность работы без о\с низкая. В максимальной скорости также проигрывает другим способам управления.
На рис. ниже — фазные напряжения. 
2 способ.
Перебор фаз с формированием 6-ти базовых векторов. Наткнулся на него в апноуте ST microelectronics [1]. Является улучшением 1-го способа (или ухудшением 3-его). Преимущества и недостатки смешаны. Рассматривать не будем, т.к. не понимаю почему имея 6 ключей не использовать способ, приведенный ниже О_о 
3 способ.
Формирование 6-ти базовых векторов. Необходимо 6 ключей. В каждый момент времени работает 3 из них. Всего существует 8 положений этих ключей, 6 векторов (формируют синусоиды) + 2 нулевых вектора (открыты все ключи верхнего или нижнего плеча). Нулевые векторы нужны для более продвинутых систем с ШИМ.
Достоинства :
— простота;
— форма напряжения питания более приближена к синусоиде;
— как следствие предыдущего вывода – меньший нагрев;
— более стабилен в работе без о\с;
Недостатки :
— поле машины всётаки не круговое, как должно быть;
— ток машины немного выше чем в идеальном случае. 
Фазные напряжения ниже. 
4 способ.
Промышленный стандарт – добавляем к предыдущему способу №3 ШИМ модуляцию между базовыми векторами, для того чтобы получить любой вектор окружности вместо 6ти.
Достоинства :
— здесь всё практически идеально. Ток минимален, магнитное поле круговое. Момент при этом не пульсирует
Недостатки :
— Для организации полноценного привода с ШИМ 6ти векторов и о\с по положению необходим DS процессор.

Так выглядит ШИМ модуляция некоего привода ТРИОЛ АТ [2].
5способ.
Векторное управление. В силу своей сложности рассматривать не будем. 
В данном случае популярный на западе Field Oriented Control — контроль по полю, конкуренцию которому позже составил DTC — Direct torque control (прямое управление моментом). Остальные способы векторного управления (по вектору потокосцепления статора, ротора. ) в промышленности я не встречал
Обратная связь по положению.
Необходимо сказать, что привод с датчиковым управлением всегда более предпочтителен чем привод с управлением без датчиков. Это касается и векторного управления асинхронными машинами и систем управления двигателем постоянного тока. Однако все пром производители стремятся исключить датчики, как лишний механический элемент.
Принцип используемой связи по противоЭДС: нам необходимо поймать момент когда полюс магнита проходит через фазу. Упрощённо это значит что ротор машины прошёл ровно половину пути и нам необходимо скорректировать (задержать) включение ключей на соответствующее время. К примеру: в способе №1 это время равно половине времени на включение ключей. В 3ем – оно равно времени работы одного базового вектора.
Технические аспекты.
Используя способ №1 необходимо на один вход компаратора подать половину питающего напряжения инвертора. На второй вход завести фазу и ловить момент когда выход компаратора изменится. Это опять же пром стандарт, который используется и в 4ом способе управления как одна из составляющих ШИМ. Кому интересны другие способы — прошу пройти по ссылке
На этом всё. В следующей статье расскажу о попытках реализовать разные способы управления и поделюсь схемами и исходниками к готовому устройству
ps Моя первая статья здесь, прошу сильно не критиковать
Комментарии ( 98 )
Для организации полноценного привода с ШИМ 6ти векторов и о\с по положению необходим DS процессор.
Так ли он необходим? А что мешает сделать систему трех шимованых синусов в виде обычной таблицы, скажем с точностью до градуса. Тогда мы получим небольшой (360*3) расход памяти и бешеную скорость формирования этого самого тройного синуса.
Осталось только отслежить положение двигателя. Тут либо датчики Холла, либо какие другие ухищрения. И получаем в результате ОС.
Тут ШИМ из векторов — к примеру 1ый и 2ой вектор — первое положение(ключи 1,2,6) второе — ключи (1,5,6) — их модулируем. Потом переходим к следующему сектору, 2-3 векторы. + туда добавляем нулевые вектора (1,3,5) и (2,4,6) и для обработки о\с, кнопок БЫСТРЕЕ, МЕДЛЕННЕЕ и тд времени нет с единственным условием. Мы пытаемся раскрутить его на максимальные обороты с частотой синусоиды 300-500 Гц и дальше 😉
если брать привод как в промышленности 0-50 Гц, то вполне может хватить и ресурса mega.
теперь понял что вы предлагаете. Но мне трудно представить как это возможно реализовать. У нас есть 6 ключей, с их помощью мы формируем сразу 3 синусоиды. А как в вашем случае?
ps существуют инверторы из 9 ключей. Там синусоида более «синусоидальная»
Ну, во первых, для современных Мег 6 аппаратных шим генераторов в порядке вещей. А для STM32 так и все 12 не проблема. Так что создать таблицу с шимами это совсем просто.
Во-вторых, нам не нужно 6 шим сигналов. достаточно только трех. Ведь у нас не просто 6 ключей, а 3-полумоста, по одному на фазу. Т.е. каждую пару ключей (верхнюю-нижнюю) можно дрыгать одним шимом, главное соблюдать dead time. Тут автомотив версии контроллеров нам в помощь. У них это аппаратно. По шиму на каждую фазу (полумост) со сдвигом на 120 градусов и вот мы получаем трехфазную систему напряжений, соотношение напряжения фаз дает нам вектор. Ну и гоняя по таблице мы можем выбрать любое значение ШИМ с точностью хоть до долей градуса, главное рассчитать таблицу правильно.
Тут правда один минус все же есть. Приходится дрыгать сразу два ключа в верхнем и нижнем плече, что несколько увеличивает потери.
Что Вы понимаете под дополнительными схемными решениями? Внешние компараторы?
У микрочипа тоже есть апноуты www.microchip.com/stellent/idcplg?IdcService=SS_GET_PAGE&nodeId=2819 например, по 18-м пикам.
Хотя 33-и намного вкуснее.
Микрочип кстати в этом преуспел, согласен!
мне понравились ихние апноуты по FOC, очень хорошо расписаны
Подключал по такой схеме: www.arduino.cc/en/Reference/StepperUnipolarCircuit
Прощупывал обмотки и обнаружил две группы:
жёлтый—зелёный, сопротивление 1.1 КОм, средний провод синий (делит на две группы с равными полусопротивлениями)
коричневый—розовый провода, сопротивление 6 Ом (отводной красный делит на две группы по 3 Ом)
Такое случается на униполярнике? Я почему-то думал, что у обмоток должны быть одинаковые сопротивления.
На крепёжном диске двигателя видна ещё какая-то микросхема, может это схема управления и для неё нужен специальный интерфейс?
Есть еще самый простой и понятный способ — фозосдвигающая цепь и 1-но фазный ШИМ.
А мануалы от ST, лучше читать с предварительной академической подготовкой. Они там такой бредятину порой пишут, передергивая основы и здравый смысл. Взять хотя бы их недавно опубликованную PMSM-FOC библиотеку. Кроме подмены аббервеатур ничего нового и тщательно маскируют недостатки и возможности своей софтины. Чего стоит толькоутверждение что датчик холла обеспечивает «точное позиционирование».
Какой-то нанятый обкуренный индус с изучением объектного кода развлекался без понимания сути и практики в предмете.
В авиамоделях используют 6 ключей… маломощные на N и P мосфетах с прямым управлением от МК для нижних и через транзюк+резюк — для верхних
потом китайци до этого же контроллера прикручивают ir2103 и получаем уже 6 одинаковых полевиков вверху внизу + дедтайм + защиты от одновременного открытия сквозняка
НО у них всех используется 2 способ а перемещение магнитой ловят смещением фазы реальной и фазы — суммы напруг на концах АВС — просто резисторами — заводят на компаратор или АЦП и вуаля
самый простой на 20-30 ампер контроллер стоит 6-8 баксов
смысла играться с такими вещами не вижу
далее
перематывать ХДД моторчики не советую
там очень слабый магнит
есть маленькая проблемка
когда полюс вентиля одной из обмоток перенасыщяется (намагничивается) больше чем магнит который к нему аналогичным полусом повёрнут — то вместо отталкиваться — магнит к нему притягивается — это называется срыв… потому что соседние катушки сами себе генерируют землю и получается что контроллер уходит в килогерцовые частоты думая что ротор за ним успевает а в реальности он стоит и гудит… свистит… ну и через 2-3 секунды обмотки обгорают так как КЗ
я пробывал перематывать и сидюковые моторки и моторки от хдд 5.25″ — фигня полная…
от ХДД кстати в родном исполнении и 24 вольтах питания можно раскрутить до 1600 оборотов и при этом иметь крутящий момент очень серьёзный… но… нужно следить ибо если оставить на максимуме модуляцию(типа газ — заполнение ШИМом верхних ключей которые в данный момент по таблице должны быть открыты) — возможен срыв ибо магнитики в ХДД очень никакие… вот когда их заменил неодимовыми шариками… уууу… отогда крутяк… можно мини болгарку сделать или ещё что — по крайней мере рукой остановить за шпиндель выходной под диск — не мог рука горит…
я же сейчас мучаю СТМVLdiscovery чтоб заставить его красиво и без глюков выдавать ШИМом высокочастотным красивые синусоиды размах которых будет контроллировать ручка газа и ток через обмотки
делаю электромопед
без контроля тока я уже катался… мотор у меня 2500 ватт
100 ампер 24 вольта
взял обычный авиамодельный хороший контроллер с драйверами и четкими таймингами — не упрощенный китайский вариант
усилил выходную часть IRF3205
посеребренные провода 2800 жильные специальные… золотые разьёмы выдерживающие 250 ампер запросто…
аккумулятор с номинальной токоотдачей 200 ампер…
короче без контроля тока прокатался я до первой выбоины когда ручка газа дрогнула…
мотора — это 8 витков проволки 10мм квадратных… тоесть полное КЗ… если б не магниты — один раз отвертку туда заосало — ели отодрал… короче бахнуло так что у всех транзисторов и драйверов посрывало крыши в прямом смысле слова…
но всётаки он ехал… и очень непривычно…
теперь вот хочу сделать свой умный и быстрый контроллер…
Ах да… контроля положения ротора нет… по обратке и смещению реального нуля и виртуального из фаз… срыва синхры не наблюдал ни разу даже на этом авиамодельном контроллере а там мега 8-я на 8 мегагерцах клокает… не сильно она шустрая… но хватает чтоб до 10 000 оборотов раскрутить мотор(2 килогерца на каждой фазе) 🙂
Так что жду Вашу статью об алгоритмах… пока что у меня затык с моментом старта когда надо в режиме шаговика его клацать это раз и… проблема с оптимальными таймингами… на низких оборотах клацаю таблицу векторов по проходу виртуальной фазы через ноль — холостой ход 0.4 ампера поднимаюсь выше 4000 — ток до 20 ампер подскакивает — я явно торможу сам себя… но как китайцы в мегу 8-ю засунули какой-то алгоритм который любые моторы крутит на любой скорости и показывает 0.3 ампера холостого току… я ума не приложу… я не делаю на данный момент синусоид красивых… мне хватает второго способа…
хотят по идее на малых газах и на максимальном газу это не эффективно и сильно подогревает транзюки(хотя 4 минты на 100 процентах газа и 90 амперах сделали еле теплыми линейку верхних транзюков(радиатор без вентилятора от пня 4-го 2 гигагерцного… до 50 ватт отводимого тепла с вентилятором при разнице 40 градусов)мой же радиатор нагрелся до 30-35 не больше… ну и мотор конечно нагрелся… градусов до 70… но у него это нормал… ему обдув… а точнее жостий продув нужен… его КПД 92 % при 50 амперах… а вот при 100 амперах уже 80… потому он кочегарить будет… но… в пути только при разгоне давиш на полную… в основном пути я трачу примерно 15-20 ампер по фазе… при газе в 30%
Источник



