
- Искусственные мышцы получились даже лучше обычных: в чем секрет?
- Идею привода для роботов подсмотрели у человеческих мышц
- Приводы для мягких роботов имитируют мышцы человека
- Искусственные мышцы за $1 соответствуют некоторым характеристикам человеческих мышц
- Основы робототехники. Виды роботов. Теория робототехники
Искусственные мышцы получились даже лучше обычных: в чем секрет?
Для разработки новых и продвинутых технологий срабатывания в мягкой робототехнике (направлении, нацеленном на конструирование роботов из совместимых мягких материалов, подобных тканям живых существ) нередко используются принципы биомиметики (биомимикрии). Эти принципы подразумевают имитацию движения мышц человека приводами машинных механизмов. Но, например, гидравлические и электрические двигатели довольно производительны, при этом жесткость не позволяет широко их использовать именно в робототехнике.
В университете Северной Аризоны (NAU) разработали искусственную мускулатуру с высокой эффективностью. Новая разработка на основе гидравлического привода обеспечивает более человекоподобные движения благодаря ее гибкости и способности адаптироваться и даже опережает человеческие мышцы по ряду характеристик.

Сами исследователи назвали новые приводы «каватаппи» из-за их схожести с одноименной разновидностью итальянской пасты, коротких рифленых спиралей с небольшим числом витков.
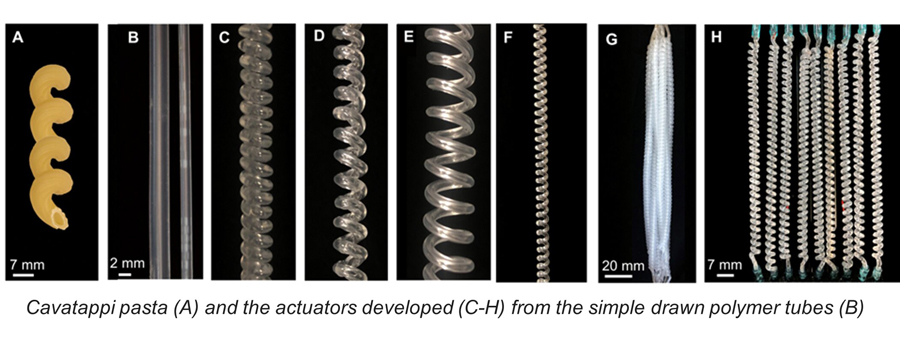
Гидравлический привод искусственных мышц изготовлен из недорогих полимерных трубок. Срабатывание происходит в результате воздействия на трубки: сначала они вытягиваются, что усиливает анизотропию их микроструктуры, а затем скручиваются и по спирали сматываются.
После вытягивания и скручивания гидравлическое или пневматическое давление внутри трубки приводит к локальному раскручиванию спиральной микроструктуры. Это раскручивание проявляется как сокращение шага спирали.
При наличии источника гидравлической или пневматической активации эти устройства могут существенно превосходить аналогичные технологии срабатывания с термической активацией в отношении ширины полосы срабатывания, эффективности, моделирования и управляемости, а также в практической реализации. Разработка способна генерировать больше энергии, поэтому хороша для робототехники.
Уже на начальном этапе разработчики продемонстрировали, что мускулатура каватаппи сокращается более чем на 50% от своей первоначальной длины, а эффективность механического сокращения составляет около 45%. Кроме того, искусственные мышцы каватаппи имеют максимальную удельную теплоту и мощность 0,38 кДж/кг и 1,42 кВт/кг соответственно. Это, в свою очередь, в 10 и 5 раз выше, чем у скелетной мускулатуры в теле человека. Дальнейшее развитие этой технологии, по мнению ученых, приведет к еще более высокой производительности.

Изначально скрученные полимерные трубки, лежащие в основе новой технологии, считались революционной идеей — приводы с ними были мощными, легкими и дешевыми. Но они были медленными и очень неэффективными, так как требовали нагрева и охлаждения. А их эффективность вообще составляла всего около 2%.
Мышцы каватаппи позволяют обойти эти недочеты, так как в разработке используется жидкость под давлением для приведения их в действие. И по этой причине есть все шансы, что технология будет широко использоваться в «мягкой» робототехнике, обычных роботизированных приводах (например, для шагающих роботов), а также в экзоскелетах.
Источник
Идею привода для роботов подсмотрели у человеческих мышц

Wyss Institute at Harvard University
Американские ученые разработали мягкий привод для роботов, функционирующий как человеческая мышца. Результаты работы опубликованы в журнале Advanced Materials Technologies.
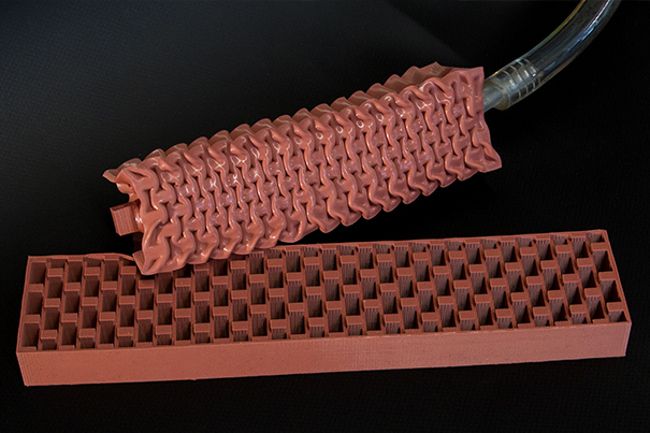
Созданный сотрудниками Гарвардского университета актуатор из эластичного материала имеет ячеистую структуру. Полости в нем соединены с вакуумным насосом, который, откачивая из них воздух, заставляет всю конструкцию сокращаться. Форма и расположение ячеек обеспечивают равномерное сокращение по всей длине эластомера.
Изменяя конфигурацию и положение полостей, можно добиться линейного, скручивающего, сгибающего движений или их комбинаций Это позволяет приводам, названным VAMP (vacuum-actuated muscle-inspired pneumatic structures, приводимые вакуумом и вдохновленные мышцами пневматические структуры) сокращаться подобно настоящей мышце.

Wyss Institute at Harvard University
«Разработаны и другие мягкие актуаторы, но этот наиболее похож на мышцу в плане времени ответа и эффективности», — сказал руководитель исследования Джордж Уайтсайдз (George Whitesides).
Как отмечают исследователи, привод планируется использовать при создании роботов, непосредственно контактирующих с людьми, например, помогающих инвалидам, доставляющих заказы, сервирующих стол и т. п. В силу своей конструкции «робомышцы» безопасны в использовании: они поглощают удары, продолжают работать при двухмиллиметровом повреждении и в случае поломки просто перестают работать, не лопаясь, не загораясь и не оставляя острых краев.
Источник
Приводы для мягких роботов имитируют мышцы человека
Для того, чтобы более тесно сотрудничать с роботами при выполнении совместных с людьми работ, они должны стать мягче и безопаснее. Новый привод разработан группой ученых под руководством Джорджа Уайтсайдса из гарвардского института Висса. Как и настоящие мышцы, эти приводы мягкие и амортизирующие, так что они не представляют никакой опасности для окружающей их среды, работающих рядом с ними людей или других роботов.
«Функционально наши приводы моделируют бицепсную мышцу человека», — сказал Уайтсайдс. «Разработаны и другие мягкие приводы, но этот наиболее похож на мышцы с точки зрения времени отклика и эффективности».
Команда Уайтсайдса «использовала нетрадиционный подход, используя вакуум, чтобы уменьшить объем привода и привести к его стягиванию. В то время как прежние мягкие приводы основаны на герметичных системах, которые расширяются в объеме, VAMP имитирует настоящую мышцу, потому что он сжимается, что делает привод привлекательным вариантом для использования в условиях ограниченного пространства и для других целей».
Этот привод из мягкой резины или эластомера заполняется маленькими полыми djpleiysvb камерами, как соты. В условиях разряжения камеры сжимаются и весь привод сокращается, вызывая перемещение. Внутренняя структура соты может быть произвольной для того, чтобы выполнять линейное перемещение, скручивание, сгибание или комбинаторные движения.
VAMPS функционально моделирует человеческий бицепс, подобен биологической мышце с точки зрения времени отклика и эффективности.
Разработчики полагают, что роботы, созданные с помощью VAMP могут быть использованы для оказания помощи инвалидам или пожилым людям, чтобы подавать пищу, доставлять товары, а также выполнять другие задачи, связанные с сервисной индустрией. Более того, мягкие роботы могли бы сделать промышленные производственные линии безопаснее и быстрее, упростить управление, позволяя операторам работать в непосредственной близости от робота.
Несмотря на то, что полная система управления для VAMP еще не разработана, этот тип привода легко контролировать из-за его простоты: при разряжжении в системе, VAMP будет сжиматься. Его можно использованы как часть автономной или подключенной к стационарному компрессору системы, в зависимости от окружающей среды или потребностей исполнения. Кроме того, VAMP обеспечит бесперебойность работы – даже при повреждении оболочки с отверстием 2 мм привод будет по-прежнему функционировать. В том случае, если системе причинен крупный ущерб, она останется безопасной.
«Она не может взорваться, потому что искробезопасная», — сказал Уайтсайдс. В то время как другие приводы с питанием от электричества или двигателей внутреннего сгорания могут привести к повреждению оборудования и травмам у людей, потеря вакуума в VAMP просто сделает привод неподвижным.
«Эти биотехнологические, самовосстанавливающиеся исполнительные механизмы приводят нас еще на шаг ближе к возможности построить полностью мягкотелых роботов, которые помогут сблизить людей и роботов, открыть совершенно новые области применения в медицине и за ее пределами», — сказал Дональд Ингбер, директор-учредитель из института Висса.
Источник
Искусственные мышцы за $1 соответствуют некоторым характеристикам человеческих мышц

Один из вариантов искусственных мышц можно увидеть в верхней части фотографии (две трубочки). Они поднимают автомобильную покрышку весом 22 кг. Фото: Массачусетский технологический институт
Искусственные «мышцы» претендуют на роль безопасных и мощных приводов для множества различных устройств: от обычных машин до имплантируемой электроники и робототехники. Но часто конструкция и производство таких «мышц» слишком сложны и дороги, что ограничивает их использование. Группа учёных из Массачусетского технологического института и Гарвардского университета разработали предельно простую конструкцию биосовместимого привода стоимостью менее доллара, при этом достаточно мощного для столь примитивного устройства.
Приводы можно изготавливать из разных материалов и разного размера, используя опубликованный дизайн в стиле оригами. Они работают в воздухе, под водой, в вакууме.
Базовая концепция нового устройства включает в себя только сжимаемый каркас, внешнюю оболочку («кожу») и наполнитель, коим может быть любой флюидный материал, например, воздух или вода.
Эксперименты показали, что подобные приводы способны сжиматься до 10% своей максимальной длины, они выдерживают нагрузку до 600 кПа, а максимальная удельная мощность превышает 2 киловатта на килограмм. Это примерно соответствует или даже превышает удельную мощность человеческих мышц.

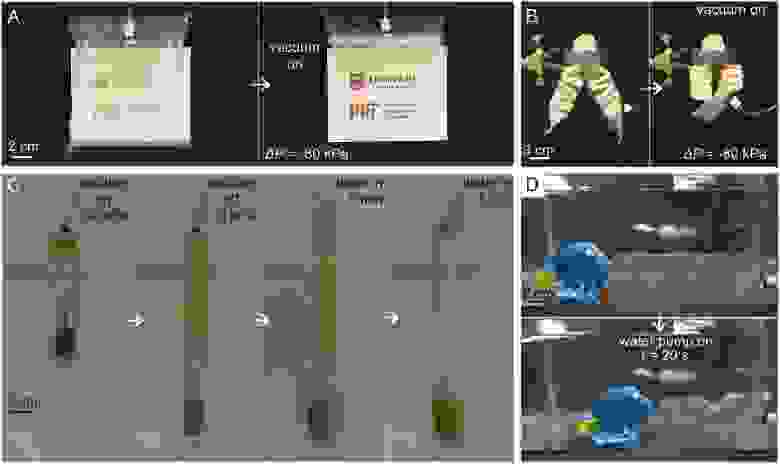
Дизайн, процесс производства и получившиеся многомасштабные приводы
Работа искусственных мышц, а также дешёвый процесс их производства показан на иллюстрации вверху.
(А) Миниатюрные линейные приводы с применением зигзагообразных оригами-структур из полиэфирэфиркетона (PEEK) в качестве каркасов и плёнки ПВХ в качестве «кожи». Благодаря применению биосовместимых материалов такие приводы пригодны для использования в медицинских имплантатах и носимой электронике. (В) Большой мощный привод, собранный на зигзагообразном каркасе из нейлоновых печатных форм. «Кожа» сделана из нейлона с покрытием из термопластичного полиуретана. Автомобильное колесо весом 22 кг поднимается на высоту 20 см за 30 секунд (видео). (С) Принцип работы привода. Сокращение мышц происходит, в основном, за счёт силы натяжения «кожи». Эта сила создаётся разницей давления между внутренней и внешней флюидной средой. Удаление флюидного материала из привода временно увеличивает внутреннее давление. (D) Процесс производства. Стандартный привод можно быстро произвести в три простых этапа: создание каркаса, используя любой из множества способов производства; подготовка «кожи»; запечатка герметичного влагонепроницаемого слоя.
Линейные зигзагообразные приводы, изготовленные разными методами из различных материалов
В части A показан тонкий прозрачный привод, который поднимает акриловую пластину. Здесь каркас изготовлен из прозрачного полотна полиэстера толщиной 0,254 мм методом лазерной резки и ручной складки. Кожа: прозрачная плёнка ПВХ (винил) толщиной 0,102 мм. Флюидный материал: воздух.
На иллюстрации В мягкий линейный привод хорошо работает даже будучи заключённым в металлическую гайку. Каркас и кожа: силиконовая резина и термопластичный полиуретан 0,24 мм. Флюидный материал: воздух.
На иллюстрации С вакуумный растворимый привод растворяется в горячей воде при температуре около 70°С за пять минут. И каркас, и кожа изготовлены из поливинилацетата. Флюидный материал: воздух.
Наконец, на последней иллюстрации показано, что привод с водой вместо воздуха в качестве флюидного материала на стальном каркасе успешно работает под водой, в частности, передвигает 3,5-сантиметровую рыбку.
«Приводы типа искусственных мышц — это одна из самых главных задач вообще в инженерном деле, — говорит кандидат наук Роб Вуд (Rob Wood), один из четырёх авторов научной работы. — Теперь мы создали приводы с характеристиками, сходными с настоящими мышцами, так что можно представить изготовление практически любого робота для практически любой задачи».
Научная статья опубликована 27 ноября 2017 года в журнале Proceedings of the National Academy of Sciences (doi: 10.1073/pnas.1713450114, pdf).
Источник
Основы робототехники. Виды роботов. Теория робототехники

Робототехника – это относительно новое и очень развивающееся направление в научной деятельности, появившееся благодаря потребности в тотальной автоматизации нынешнего производства и в повышении его эффективности. Идея создать какой-то автономный механизм, который бы своим внешним видом напоминал человека или другое живое существо терзала мечтателей ещё с незапамятных времен. Ещё Гомер в своем произведении «Илиада» говорил о том, что бог огня и покровитель кузнечного ремесла, выковал из золота девушек, которые исполняли его поручения.
Теория робототехники опирается на такие науки, как информатика, электроника, механика.
Робототехника бывает нескольких видов:
- Промышленная
- Строительная
- Бытовая
- Авиационная
- Экстремальная (военная, космическая и подводная).
Сегодня люди очень близко подошли к тому моменту, когда роботы будут участвовать во всех сферах жизни и деятельности человека. Именно поэтому изучение робототехники необходимо внедрять в образовательные учреждения.
Изучение робототехники позволяет постичь программирование, алгоритмизацию, основы логики и т.д. Какие же бывают роботы? А их всего два вида: манипуляционные и мобильные роботы.
Манипуляционный робот – это автоматическая машина, которая состоит из исполнительного устройства в виде манипулятора, имеющего несколько степеней подвижности, и устройства программного управления (микроконтроллер), которое служит для выполнения двигательных и управляющий функций в процессе работы. Подобные роботы очень распространены в приборостроении и машиностроении.
Мобильный робот – автоматическая машина, в которой имеется механизм перемещения с автоматически управляемыми приводами. Такие роботы могут быть колесными, летающими, шагающими, гусеничными, плавающими и даже ползающими!
Роботы состоят из самых разных компонентов. Приводы, ДПТ, шаговые электродвигатели и т.п.
Приводы – это так сказать «мышцы» любого робота. Именно эти механизмы обеспечивают движение рабочих частей робота (руки, ноги, поворот колес, поворот закрылков).
ДПТ (Двигатели постоянного тока) – обычный двигатель, который работает на постоянным током. Лёгок и прост в использовании, поэтому является одним из самых популярных двигателей.
Шаговые электродвигатели – это двигатель, вал которого поворачивается на заданный угол под управлением микроконтроллера, а не вращается свободно, как у ДПТ. Это позволяет обойтись без датчика положения, ибо угол на который сделан поворот, заведомо известен. Именно поэтому данный вид двигателей часто используется в приводах многих роботов и станках с ЧПУ.
Все эти базовые знания и основные навыки конструирования и создания роботов дети уже с 3-ёх лет могут получить в нашем учреждении дополнительного образования. Кроме прослушивания теории на занятиях ребята и девчата имеют полный доступ к оборудованию и закрепляют пройденные темы, выполняя практические задания.
Источник



