
- Определение механической характеристики привода
- Функциональная схема
- Функциональные части:
- Характеристики привода
- Виды электроприводов
- Подбор электродвигателя
- Алгоритм выбора электропривода
- Современные российские производители и поставщики электроприводов
- Механические характеристики электродвигателей и производственных механизмов
Определение механической характеристики привода
Электрический привод (сокращённо — электропривод) — это электромеханическая система для приведения в движение исполнительных механизмов рабочих машин и управления этим движением в целях осуществления технологического процесса.
Современный электропривод — это совокупность множества электромашин, аппаратов и систем управления ими. Он является основным потребителем электрической энергии (до 60 %) и главным источником механической энергии в промышленности.
Определение по ГОСТу Р 50369-92 [1] Электропривод — электромеханическая система, состоящая из преобразователей электроэнергии, электромеханических и механических преобразователей, управляющих и информационных устройств и устройств сопряжения с внешними электрическими, механическими, управляющими и информационными системами, предназначенная для приведения в движение исполнительных органов рабочей машины и управления этим движением в целях осуществления технологического процесса.
Как видно из определения, исполнительный орган в состав привода не входит. Однако, авторы авторитетных учебников [2] [3] включают исполнительный орган в состав электропривода. Это противоречие объясняется тем, что при проектировании электропривода необходимо учитывать величину и характер изменения механической нагрузки на валу электродвигателя, которые определяются параметрами исполнительного органа. При невозможности реализации прямого привода электродвигатель приводит исполнительный органа в движение через кинематическую передачу. КПД, передаточное число и пульсации, вносимые кинематической передачей также учитываются при проектировании электропривода.
Функциональная схема

- Регуляторы (Р) предназначен для управления процессами, протекающими в электроприводе.
- Электрический преобразователь (ЭП) предназначен для преобразования электрической энергии сети в регулируемое напряжение постоянного или переменного тока.
- Электромеханический преобразователь (ЭМП) — двигатель, предназначен для преобразования электрической энергии в механическую.
- Механический преобразователь (МП) может изменять скорость вращения двигателя, а ткаже характер движения (с вращательного на вращательное или с вращательного на поступательное).
- Упр — управляющие воздействие.
- ИО — исполнительный орган.
Функциональные части:
- Силовая часть или электропривод с разомкнутой системой регулирования;
- Механическая часть;
- Система управления электропривода.
Характеристики привода
Под статическими характеристиками чаще всего подразумеваются электромеханическая и механическая характеристика.
Механическая характеристика — это зависимость угловой скорости вращения вала к от электромагнитного момента M (или от момента сопротивления Mc). Механические характеристики являются очень удобным и полезным инструментом при анализе статических и динамических режимов электропривода.[4]
Электромеханическая характеристика двигателя
Электромеханическая характеристика — это зависимость угловой скорости вращения вала W от тока I.
Виды электроприводов
- Нерегулируемые, простейшие, предназначенные для пуска и остановки двигателя, работающие в односкоростном режиме.
- Регулируемые, допускающие изменение частоты вращения и управление пуском и торможением электродвигателя для заданного технологического процесса. Способ регулирования зависит от типа двигателя. Так, для машин переменного тока применимо управление частотой, током в роторе, переключением пар полюсов статора. Для коллекторных машин применимо регулирование напряжением.
- Неавтоматизированные
- Автоматизированные
- Линейные — для частных случаев.
- Вращательные — наиболее распространённый тип. Чаще всего линейное перемещение получают механическими преобразователями вращательного движения двигателя.
Подбор электродвигателя
Качество работы современного электропривода во многом определяется правильным выбором используемого электрического двигателя, что в свою очередь обеспечивает продолжительную надёжную работу электропривода и высокую эффективность технологических и производственных процессов в промышленности, на транспорте, в строительстве и других областях.
При выборе электрического двигателя для привода производственного механизма руководствуются следующими рекомендациями:
- Исходя из технологических требований, производят выбор электрического двигателя по его техническим характеристикам (по роду тока, номинальным напряжению и мощности, частоте вращения, виду ме ханической характеристики, продолжительности включения, перегрузочной способности, пусковым, регулировочным и тормозным свойствами др.), а также конструктивное исполнение двигателя по способу монтажа и крепления.
- Исходя из экономических соображений, выбирают наиболее простой, экономичный и надёжный в эксплуатации двигатель, не требующий высоких эксплуатационных расходов и имею щий наименьшие габариты, массу и стоимость.
- Исходя из условий окружающей среды, в которых будет работать двигатель, а также из требований безопасности работы во взрывоопасной среде, выбирают конструктивное исполнение двигателя по способу защиты.
Правильный выбор типа, исполнения и мощности электрического двигателя определяет не только безопасность, надёжность и экономичность работы и длительность срока службы двигателя, но и технико-экономические показатели всего электропривода в целом.
Алгоритм выбора электропривода
Принцип действия исполнительных механизмов не является ключевым фактором выбора электропривода, ключевыми в данном случае являются характеристики технологического процесса, которые должен обеспечить механизм. Этому же условию должен соответствовать и электропривод.
Например алгоритм выбора технических специалистов, обслуживающих технологические процессы, в которых исполнительным механизмом является трубопроводная арматура, будет следующим:
- Выполняемая функция: запорная, дросселирующее регулирование, запорно-регулирующий режим, отсечка и т. д.
- Пропускная способность.
- Транспортируемая среда: абразивная, агрессивная химически, вязкая пульпа, огнеопасный газ, пар и т. д.
- Время срабатывания арматуры (в зависимости от типа).
- Высокая ремонтопригодность и длительный срок службы.
Следует иметь в виду, что не может быть универсального электропривода. В качестве примера, приведём средний медеплавильный цех: цех имеет несколько анодных печей, печи работают в разных режимах: загрузка, плавление, восстановление, окисление и это неполный перечень. Требуемые характеристики механизмов для этих режимов различны, на каждом процессе бывает задействована различная группа приводной арматуры. Диаметры разнятся от 200 до 900 мм, различны и подающиеся среды — мазут, газ, воздух и проч., температурные режимы так же изменяются.
С другой стороны, конструкция электропривода может быть модульной, части привода могут свободно меняться, причём блоки разных исполнений должны быть по возможности унифицированы и легко заменяться.
Для некоторых механизмов, работающих в повторно-кратковременном режиме (краны, лифты), большую часть рабочего цикла двигатель работает на естественной характеристике и только относительно небольшое время работает на регулировочной характеристике, обычно на пониженной частоте вращения. В этом случае потери электроэнергии на регулировочной характеристике сравнительно невелики, так как мало время работы на ней. Поэтому здесь можно применять простые и дешёвые способы регулирования, даже если они вызывают повышенные потери мощности в обмотках.
Основными типами электродвигателей, которые используются для привода производственных механизмов с регулируемой скоростью движения рабочего органа, являются двигатели постоянного тока и асинхронные с короткозамкнутым или фазным ротором. Наиболее просто требуемые искусственные характеристики получаются у двигателей постоянного тока, поэтому до недавнего времени они преимущественно и находили применение для регулируемых электроприводов. С другой стороны, асинхронные двигатели, уступая двигателям постоянного тока по возможностям регулирования частоты вращения, по сравнению с последними проще в изготовлении и эксплуатации и имеют относительно меньшие массу, размеры и стоимость. Именно эти отличительные свойства асинхронных двигателей определили их главенствующее использование в промышленном нерегулируемом электроприводе. [5] В настоящее время двигатели постоянного тока вытесняются асинхронными двигателями с преобразователями частоты, основными производителями которых являются ABB, Schneider, Siemens, Lenze. Число выпускаемых двигателей постоянного тока составляет лишь 4-5 % числа двигателей переменного тока.
Современные российские производители и поставщики электроприводов
Проблема регулирования скорости движения машин и механизмов с целью экономии электроэнергии решалась в последние десятилетия в основном с помощью регулируемых электроприводов. Причём, если ещё в 70-80-х годах преобладающими были регулируемые электроприводы постоянного тока, то в настоящее время они повсеместно вытесняются регулируемыми электроприводами переменного тока, как правило, с асинхронными электродвигателями с короткозамкнутым ротором. Объясняется это достижениями микроэлектроники, позволяющими реализовать небольшими аппаратными затратами довольно сложные алгоритмы управления электродвигателем переменного тока, который в общем случае предпочтительнее двигателя постоянного тока по надёжности, массе, габаритам и стоимости.
Некоторые из производителей в России и СНГ:
- ОАО «Электропривод» (г.Киров)
- ООО «Электропривод» (Украина, Запорожье),
- ОАО Завод «Преобразователь» (Украина, Запорожье),
- ОАО «Запорожский электроаппаратный завод»,
- НИПТИЭМ,
- ОАО «Владимир»,
- ООО «АВВИ»,
- ООО «Двигатель»,
- ЗАО Томск,
- ООО «Кранприборсервис» на базе СКТБ Башенного Краностроения (СКТББК г. Москва),
- ООО НПФ «Ирбис» (г. Новосибирск),
- ООО «ЧЭАЗ — ЭЛПРИ» (дочернее предприятие ОАО «Чебоксарский электроаппаратный завод»),
- НТЦ «Приводная техника» (г. Челябинск),
- ЗАО «ЭРАСИБ» (г. Новосибирск)
- НПП «Уралэлектра» (г. Екатеринбург).
Источник
Механические характеристики электродвигателей и производственных механизмов
 При проектировании электропривода электродвигатель должен выбираться так, чтобы его механические характеристики соответствовали механическим характеристикам производственного механизма. Механические характеристики дают взаимосвязь переменных в установившихся режимах.
При проектировании электропривода электродвигатель должен выбираться так, чтобы его механические характеристики соответствовали механическим характеристикам производственного механизма. Механические характеристики дают взаимосвязь переменных в установившихся режимах.
Механической характеристикой механизма называют зависимость между угловой скоростью и моментом сопротивления механизма, приведенными к валу двигателя) ω = f(Mс).
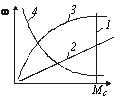
Рис. 1. Механические характеристики механизмов
Среди всего многообразия выделяют несколько характерных типов механических характеристик механизмов:
1. Характеристика с моментом сопротивления, не зависящим от скорости (прямая 1 на рис. 1). Независимая от скорости механическая характеристика графически изображается прямой, параллельной оси вращения, в данном случае вертикалью. Такой характеристикой обладают, например, подъемные краны, лебедки, поршневые насосы при неизменной высоте подачи и др.
2. Характеристика с моментом сопротивления линейно зависящим от скорости (прямая 2 на рис. 1). Такая зависимость присуща, например, приводу генератора постоянного тока с независимым возбуждением, работающему на постоянную нагрузку.
3. Характеристика с нелинейным возрастанием момента (кривая 3 на рис. 1). Типичными примерами емогут служить характеристики вентиляторов, центробежных насосов, гребных винтов. Для этих механизмов момент Мс зависит от квадрата угловой скорости ω . Это т.н. параболичская (вентиляторная) механическая характеристика.
4. Характеристика с нелинейно спадающим моментом сопротивления (кривая 4 на рис. 1). Здесь момент сопротивления обратно пропорционален скорости вращения. Мощность в этом случае остается постоянной на всем диапазоне рабочей скорости механизма. Например, у механизмов главного движения некоторых металлорежущих станков (токарных, фрезерных, расточных) момент Мс изменяется обратно пропорционально ω , а мощность потребляемая механизмом, остается постоянной.
Механической характеристикой электродвигателя называется зависимость его угловой скорости от вращающего момента ω д = f(M).Здесь следует иметь ввиду, что момент М на валу двигателя независимо от направления вращения имеет положительный знак — момент движущий. Вместе с тем момент сопротивления Мс имеет знак отрицательный.
В качестве примеров на рис. 2 приведены механические характеристики: 1 — синхронного двигателя; 2 – двигателя постоянного тока независимого возбуждения; 3 – двигателя постоянного тока последовательного возбуждения.
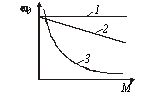
Для оценки свойств механических характеристик электропривода используют понятие жесткости характеристики. Жесткость механической характеристики определяется по выражению
где d М – изменение момента двигателя; d ω д – соответствующее изменение угловой скорости.
Для линейных характеристик значение β остается постоянным, для нелинейных – зависит от рабочей точки.
Используя это понятие, характеристики, приведенные на рис. 2, можно качественно оценить так: 1 – абсолютно жесткая ( β = ∞ ); 2 – жесткая; 3 – мягкая.
Абсолютно жесткая характеристика — скорость вращения двигателя остается неизменной при изменении нагрузки двигателя в пределах от нуля для номинальной. Такой характеристикой обладают синхронные двигатели.
Жесткая характеристика — скорость вращения меняется незначительно при изменении нагрузки от нуля до номинальной. Такой характеристикой обладает двигатель постоянного тока с параллельным возбуждением, а также асинхронный двигатель в области линейной части характеристики.
Жесткой характеристикой принято считать такую, у которой изменение скорости не превышает приблизительно 10% номинальной скорости при изменении нагрузки от нуля до номинальной.
Мягкая характеристика — скорость вращения двигателя меняется значительно при сравнительно небольших изменениях нагрузки. Такой характеристикой обладает двигатель постоянного тока с последовательным, смешанным или с параллельным возбуждением, но с добавочным сопротивлением в цепи якоря, а также асинхронный с сопротивлением в цепи ротора.
Для большинства производственных механизмов используют асинхронные двигатели с короткозамкнутым ротором, имеющие жесткую механическую характеристику.
Все механические характеристики электродвигателей делятся на естественные и искусственные.
Естественная механическая характеристика относится к условиям работы двигателя с номинальными значениями параметров.
Например, для двигателя с параллельным возбуждением естественная характеристика может быть построена для случая, когда напряжение на якоре и ток возбуждения имеют номинальные значения, а в цепи якоря отсутствует добавочное сопротивление.
Естественная характеристика асинхронного двигателя соответствует номинальному напряжению и номинальной частоте переменного тока, подводимого к статору двигателя при условия отсутствия добавочного сопротивления в цепи ротора.
Таким образом, для каждого двигателя естественная характеристика может быть построена только одна, а искусственных — неограниченное количество. Например, каждому новому значению сопротивления якоря двигателя постоянного тока или в цепи ротора асинхронного двигателя отвечает своя механическая характеристика.

Если Вам понравилась эта статья, поделитесь ссылкой на неё в социальных сетях. Это сильно поможет развитию нашего сайта!
Подписывайтесь на наш канал в Telegram!
Просто пройдите по ссылке и подключитесь к каналу.
Не пропустите обновления, подпишитесь на наши соцсети:
Источник



