
Механизмы приводов главного движения со ступенчатым регулированием скорости.
Механизмы главного движения. В качестве механизма главного движения применяют индивидуальный привод, который состоит из электродвигателя, ременной или зубчатой передачи, коробки скоростей со шпинделем (шпиндельной бабки). Индивидуальный привод позволяет получать большую частоту вращения шпинделя и менять ее, расстанавливать станки соответственно технологическому процессу, более рационально использовать мощность электродвигателя, т. е. включать станки независимо друг от друга.
Электродвигатели индивидуальных приводовустанавливают на передней тумбе станка 1 (см. рис. 1) или на полу, возле нее. В некоторых станках электродвигатели устанавливают непосредственно на шпиндельной бабке, например у полуавтоматов мод. 116 Такое расположение электродвигателя вызывает колебания станка, их нужно избегать.
 Встроенный привод — это такой привод, у которого детали электродвигателя являются органической частью станка, например корпус передней бабки является корпусом электродвигателя, а ротор смонтирован непосредственно на шпинделе. Приводы такого типа применяют в шлифовальных, токарных и других станках. В некоторых металлорежущих станках в корпусе передней бабки устанавливают зубчатые колеса, создающие различные частоты вращения шпинделя. Шпиндельные коробки при такой конструкции применяют во многих токарно-винторезных станках, например в станках мод. 16К20 (см. рис 10), мод. 136 и др
Встроенный привод — это такой привод, у которого детали электродвигателя являются органической частью станка, например корпус передней бабки является корпусом электродвигателя, а ротор смонтирован непосредственно на шпинделе. Приводы такого типа применяют в шлифовальных, токарных и других станках. В некоторых металлорежущих станках в корпусе передней бабки устанавливают зубчатые колеса, создающие различные частоты вращения шпинделя. Шпиндельные коробки при такой конструкции применяют во многих токарно-винторезных станках, например в станках мод. 16К20 (см. рис 10), мод. 136 и др
В токарно-винторезных станках применяют раздельные коробки скоростей. Например, у токарно-винторезного станка мод 1А616 коробка скоростей выполнена в отдельном корпусе и смонтирована в передней тумбе (рис. 13), а перебор со шпинделем — в корпусе передней бабки. Движение от коробки скоростей на шпиндель передается клиноременной передачей. Такой привод уменьшает колебания шпинделя, так как колебания, возникающие в коробке скоростей, не передаются через гибкое звено — клиновые ремни на шпиндельную коробку. Кроме того, возможно применение унифицированной коробки скоростей для гаммы однотипных моделей станков
Подвижную шпиндельную коробку применяют в расточных станках (см. рис 7), где необходима перестановка шпинделя в горизонтальном направлении для обработки отверстий в детали на различной высоте от установочной поверхности стола. В корпусе шпиндельной коробки монтируют не только цепь главного движения, но и подачи.
 В прецизионных станках механизм главного движения выполняют таким образом, что движение на шпиндель передается от коробки скоростей через ременную передачу. Последняя уменьшает передачу колебаний на шпиндель, возникающих в коробке скоростей, вследствие чего повышается точность обработки.
В прецизионных станках механизм главного движения выполняют таким образом, что движение на шпиндель передается от коробки скоростей через ременную передачу. Последняя уменьшает передачу колебаний на шпиндель, возникающих в коробке скоростей, вследствие чего повышается точность обработки.
В горизонтально-фрезерных (рис. 14) и других типах станков механизмы главного движения и движения подачи выполняются независимыми, т. е. движение на шпиндель и на стол передается от отдельных электродвигателей Это значительно упрощает конструкцию станка — нет телескопического ва лика с универсальными шарнирами, возможно передавать бо, [ьшую мощность на механизм подачи стола. Механизм главного движения горизонтально-фрезерного станка мод. 6Н32 состоит из привода 6, шпиндельной коробки 5 (шпиндельная коробка имеет 18 ступеней частот вращении от 30 до 1500 об/миь.; механизм подачи состоит из электродвигателя 1 коробки подач 7 (с пределами подач от 28 до 1180 мм/мин, число подач 18), ходового винта 2 и гайки. Для повышения жесткости шпинделя станок снабжен хоботом 4, несущим опору 3.
У некоторых металлорежущих станков главное движение является возвратно-поступательным, например в строгальных, долбежных, зубострогапьиых и др В качестве механизмов, преобразующих вращательное движение в возвратно-поступатетьиое применяют кулисы, кривошипы, шестеренчатые реверсы с реечной парой и др. Механизм глрвного движения одностоечного продольно-строгального станка состоит изэлектродвигателя /, коробки скоростей 2 (рис 15). Вращательное движение от электродвигателя передается на валы / и // всегда в одном направлении, а на вал III — в прямом и обратном направлении, что достигается включением электромуфты 3 влево и зубчатых колес z = 55 или 63 (рабочий ход) или вправо и зубчатого колеса z = 76 (обратный быстрый ход). В соответствии с движениями вала /// осуществляется и реверсивное движение зубчатых передач и реечной шестерниг= 14, последняя и осуществляет возвратно-поступательное движение стола 4.
Механизмы приводов подачи с бесступенчатым регулированием.
Источник
ПРИВОДЫ ГЛАВНОГО ДВИЖЕНИЯ СО СТУПЕНЧАТЫМ РЕГУЛИРОВАНИЕМ
РЯДЫ ЧАСТОТ ВРАЩЕНИЯ ШПИНДЕЛЯ
Главными приводами со ступенчатым регулированием частоты вращения шпинделя оснащают автоматизированные редко переналаживаемые станки, работающие в массовом производстве, и неавтоматизированные станки с ручным управлением. Такие приводы просты, компактны, имеют высокий КПД, долговечны. Однако они не пригодны для станков с ЧПУ, так как не всегда обеспечивают требуемую частоту вращения шпинделя (регулирование частоты ступенчатое) и не позволяют оптимальное регулирование скорости резания в процессе выполнения цикла обработки.
Частоты вращения шпинделя  образуют
образуют
отрезок геометрического ряда со знаменателем  Число ступеней частот — z. Основные зависимости геометрического ряда: члены ряда
Число ступеней частот — z. Основные зависимости геометрического ряда: члены ряда

диапазон регулирования привода

число ступеней частоты вращения шпинделя

знаменатель геометрического ряда
 (4.1)
(4.1)
Из основных зависимостей следует, что геометрический ряд частот вращения шпинделя может быть построен, когда исходными данными являются: ого ряда

Стандартные знаменатели геометрического ряда  имеет вспомогательное значение, при проектировании станков применяется редко;
имеет вспомогательное значение, при проектировании станков применяется редко;  1,12 — применяют при проектировании автоматов и тяжелых станков, когда важна точная настройка на заданный режим резания;
1,12 — применяют при проектировании автоматов и тяжелых станков, когда важна точная настройка на заданный режим резания;  и
и  применяют при проектировании универсальных токарных, сверлильных, фрезерных и других станков;
применяют при проектировании универсальных токарных, сверлильных, фрезерных и других станков;  применяют при проектировании станков, обработка на которых не требует точной настройки на режим резания из-за большого вспомогательного времени;
применяют при проектировании станков, обработка на которых не требует точной настройки на режим резания из-за большого вспомогательного времени;  имеет вспомогательное значение.
имеет вспомогательное значение.
Рекомендуемые диапазон регулирования главного привода станков разных групп и числа ступеней частот вращения шпинделя приведены в табл. 4.1. Ряды частот вращения стандартизованы.

ТИПЫ ПЕРЕДАЧ
Механическая часть электромеханического главного привода со ступенчатым регулированием частоты вращения шпинделя состоит из постоянных и групповых передач (групп передач). Постоянные передачи (зубчатые, ременные) служат для редуцирования частоты вращения и формирования пространственной компоновки станка. Групповые передачи (рис. 4.1) обеспечивают требуемый ряд частот вращения шпинделя.
Передача с передвижными колесами (рис. 4.1, а) позволяет передавать большие крутящие моменты, имеет высокий КПД, так как в работе участвует только одна пара зубчатых колес. В ней нельзя использовать косозубые колеса, нельзя переключать ее на ходу.
Передачу с электромагнитными муфтами (рис. 4.1, б) можно переключать на ходу, что позволяет автоматизировать управление приводом. Передача может состоять из косозубых колес.
Передача со сменными колесами (рис. 4.1, в) отличается компактностью. Применяется в станках, которые переналаживаются редко.
Передачи с плоским ремнем и сменными (рис. 4.1, г) или ступенчатыми шкивами (рис. 4.1, д) работают плавно, однако имеют большие габариты.

ПРИВОДЫ С ПОСЛЕДОВАТЕЛЬНО СОЕДИНЕННЫМИ ГРУППОВЫМИ
Многогрупповая структура включает  последовательно соединенных групповых передач
последовательно соединенных групповых передач  с соответствующими числами передач
с соответствующими числами передач 
 Общее число ступеней скорости шпинделя
Общее число ступеней скорости шпинделя 
В привод входит основная группа, с помощью которой получают ряд частот вращения со знаменателем  На структурной сетке привода она изображается лучами, расходящимися на один интервал, т.е. характеристика основной группы равна единице.
На структурной сетке привода она изображается лучами, расходящимися на один интервал, т.е. характеристика основной группы равна единице.
Первая переборная группа имеет характеристику, равную числу передач основной группы. Характеристика второй переборной группы равна произведению чисел передач основной и первой переборной групп. Аналогично определяются характеристики других групп.
Последовательность расположения передач (основной и переборных) теоретически может быть любой, она определяет конструкцию привода. Пусть для определенности основной является группа а ; первой переборной, следующей за основной, служит b второй переборной, расположенной за первой, — с и т.д. Тогда характеристики групп

и структурная формула привода

Выполняя кинематический расчет, привод изображают в виде структурной сетки. Число горизонтальных линий в ней на единицу больше числа групп передач в приводе, число вертикальных равно числу ступеней передач.
В поле между соседними горизонтальными линиями с помощью лучей изображают соответствующую передачу. Привод с последовательно включенными групповыми передачами изображается в виде веерообразной сетки.
Пример 1. Построим структурную сетку привода с последовательно соединенными передачами и числом скоростей  . При этом
. При этом  Пусть первая по порядку группа основная, следующая —первая переборная, затем вторая переборная и тд. Характеристики групповых передач:
Пусть первая по порядку группа основная, следующая —первая переборная, затем вторая переборная и тд. Характеристики групповых передач: 
 Структурная формула привода:
Структурная формула привода: 
Структурная сетка привода изображена на рис. 4.2, а.
Источник
Приводы подач со ступенчатым регулированием




![]()
![]()
Токарно-винторезные, вертикально-сверлильные и станки других типов имеют приводы подачи, кинематически связанные с главным приводом (рис 10,1, а, б). Шпиндель получает вращение от электродвигателя М через коробку скоростей с регулируемым передаточным отношением in и ряд постоянных передач iпп . Тяговый механизм привода подачи связан со шпинделем с помощью коробки передач или сменных колес с регулируемым передаточным отношением is и постоянных передач isп .Фрезерные и другие станки имеют привод подачи с отдельным электродвигателем (рис. 10.1,в,г) .
 Для изменения подачи применяют коробки передач с передвижными колесами или электромагнитными муфтами, сменные зубчатые колеса и специальные механизмы. Компактный механизм со ступенчатым конусом (рис. 10.2,а) позволяет получать от 4 до 12 ступеней подачи. В цепь подачи он может быть включен таким образом, что от конуса зубчатых колес движение с помощью колес z1 и z2 передастся на вал II каретки или в обратном направлении — от вала II каретки на вал I конуса. Недостатком механизма является пониженная жесткость.
Для изменения подачи применяют коробки передач с передвижными колесами или электромагнитными муфтами, сменные зубчатые колеса и специальные механизмы. Компактный механизм со ступенчатым конусом (рис. 10.2,а) позволяет получать от 4 до 12 ступеней подачи. В цепь подачи он может быть включен таким образом, что от конуса зубчатых колес движение с помощью колес z1 и z2 передастся на вал II каретки или в обратном направлении — от вала II каретки на вал I конуса. Недостатком механизма является пониженная жесткость.
Механизм с вытяжной шпонкой (рис. 10.2, б) состоит из колес, находящихся в постоянном зацеплении. На валу I колеса закреплены, на валу II установлены свободно. Вытяжная шпонка, которую можно перемешать вдоль прорези в валу, входит в шпоночный паз одного из колес и связывает его с валом II. В этом компактном механизме можно установить косозубые колеса. Механизм имеет сравнительно малую жесткость.
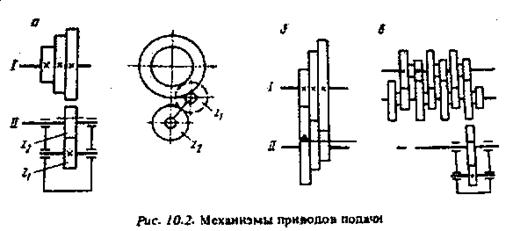
Механизм типа меандра (рис. 10.2, в) состоит из нескольких одинаковых зубчатых блоков и передвижной каретки с накидным или передвижным колесом. Зубчатые блоки, за исключением одного, на валах установлены свободно. Передаточные отношения передач образуют геометрический ряд. Для механизма характерны малые осевые габариты, большой диапазон регулирования и а то же время пониженные жесткость и износостойкость.
Приводы подачи со ступенчатым регулированием применяют в универсальных неавтоматизированных станках, а также в редко переналаживаемых автоматах и полуавтоматах.
Источник



