
Приводы мехатронных систем. Способы управления МС
Описание: Способы управления МС. Привод как известно включает прежде всего двигатель и устройство управления им. Требования предъявляемые к их способу управления быстродействию и точности непосредственно определяются соответствующими требованиями к МС в целом. Наряду с общей обратной связью по положению в схеме имеется обратная связь по скорости которая играет роль корректирующей гибкой обратной связи и часто кроме того служит для управления скоростью.
Поделитесь работой в социальных сетях
Если эта работа Вам не подошла внизу страницы есть список похожих работ. Так же Вы можете воспользоваться кнопкой поиск
Лекция 5. Приводы мехатронных систем. Способы управления МС.
Привод, как известно, включает, прежде всего, двигатель и устройство управления им. Кроме того, в состав привода могут входить различные механизмы для передачи и преобразования движения (редукторы, преобразователи вращательного движения в поступательное и наоборот), тормоз и муфта.
К приводам, применяемым в МС, предъявляют весьма жесткие специфические требования. В связи с необходимостью встраивания приводов в рабочие органы МС в манипуляторы и системы передвижения габариты и масса приводов должны быть минимальными. Приводы в МС работают в основном в неустановившихся режимах и с переменной нагрузкой. При этом переходные процессы в них должны быть практически неколебательными. Важными параметрами приводов МС являются также надежность, стоимость, удобство эксплуатации. Требования, предъявляемые к их способу управления, быстродействию и точности, непосредственно определяются соответствующими требованиями к МС в целом. В частности, обычно требуется, чтобы скорость поступательного движения на выходе приводов МС в среднем составляла от долей до нескольких м/с при погрешности отработки перемещения, равной долям миллиметра.
В МС нашли применение практически все известные типы приводов: электрические, гидравлические и пневматические; с поступательным и вращательным движением; регулируемые (по положению и скорости) и нерегулируемые; замкнутые (с обратной связью) и разомкнутые; непрерывного и дискретного действия (в том числе шаговые).
На рис. 1приведена типовая схема привода манипулятора. Наряду с общей обратной связью по положению в схеме имеется обратная связь по скорости, которая играет роль корректирующей гибкой обратной связи и часто, кроме того, служит для управления скоростью. В тех случаях, когда механизм М является редуктором и понижает скорость, датчик скорости ставится не как показано на рисунке, а на выходе двигателя перед механизмом, чтобы увеличить снимаемый с датчика сигнал по скорости. Устройство управления может быть непрерывного действия, релейным, импульсивным или цифровым.

Рис.1 Типовая схема позиционного привода манипуляторов:
Д двигатель; М механизм передачи и преобразования перемещения; ДП, ДС датчики положения и скорости;
УУ П1 , УУ П2 составные части устройства управления УУ П
Применение пневматических приводов в МС объясняется их дешевизной, простотой и соответственно надежностью. Правда, эти приводы плохо управляемы и поэтому используются в основном как нерегулируемые с цикловым управлением. Пневматические приводы применяют только в роботах небольшой грузоподъемности до 10 кг, реже 20 кг.
Гидравлические приводы наиболее сложны и дороги по сравнению с пневматическими и электрическими. Однако при мощности 5001000 Вт и выше они обладают наилучшими массогабаритными характеристиками и поэтому являются основным типом привода для тяжелых и сверхтяжелых МС. Гидравлические приводы хорошо управляются, поэтому они нашли также применение в МС средней грузоподъемности, для которых требуются высококачественные динамические характеристики.
Электрический привод, несмотря на его хорошую управляемость, простоту подвода энергии, больший к.п.д. и удобство эксплуатации имеет худшие массогабаритные характеристики, чем пневматический и гидравлический приводы. Прогрессивное увеличение в последние годы доли электромеханических МС в общем парке мехатронных устройств в мире вызвано быстрым прогрессом в создании новых типов электрических двигателей, изначально предназначенных для роботов и позволяющих создавать более компактные комплектные приводы всех требуемых типов. На сегодня основная область применения электрических приводов в мехатронике это устройства средней грузоподъемности (десятки килограмм), легкие МС с высококачественным управлением и мобильные роботы.
Для иллюстрации сказанного на рис. 2 и 3 приведены обобщенные сравнительные характеристики различных типов приводов по удельной мощности и стоимости. При расчете удельной мощности пневмоприводов учитывалась масса аппаратуры подготовки воздуха , гидроприводов масса гидростанции , которые входят в конструкцию МС.

Рис. 2. Удельная мощность (отнесенная к весу) электрических (Э), гидравлических (Г) и пневматических (П) приводов в зависимости от их абсолютной мощности

Рис. 3 Удельная стоимость электрических (Э), гидравлических (Г)
и пневматических (П) приводов в зависимости от их мощности
Способы управления МС. В мехатронике существуют 3 задачи управления: управление манипуляторами, системой передвижения и совместное управление группой мехатронных устройств. Применяемые для решения этих задач способы управления можно классифицировать следующим образом.
По степени участия человека в процессе управления существуют системы:
По типу алгоритма автоматического управления различают системы:
По типу движения существуют системы управления:
дискретные позиционные (шагами «от точки к точке»);
• дискретные цикловые (с одним шагом по каждой координате).
(В отечественной литературе дискретное позиционное управление часто называется просто позиционным.)
По виду управляемых переменных различают системы управления:
Применительно к управлению манипуляторами эти способы означают управление абсолютными координатами его рабочего органа х Р , , его скоростью х р и силой Q P .
Часто перечисленные способы управления применяются в комбинации одновременно по разным координатам, в виде некоторой функциональной зависимости одной управляемой переменной от другой или путем последовательного перехода от одного способа управления к другому.
Источник
Пневматические устройства мехатронных систем
Мобильные машины, роботы и различные мехатронные системы имеют возможность передвигаться или изменять положение своих частей благодаря исполнительным механизмам. Направление перемещения той или иной части системы именуется степенью свободы, и чем больше степеней свободы у исполнительного механизма — тем больше у машины, робота или исполнительного устройства подвижность.
В зависимости от типа исполнительного устройства, достигается более или менее качественная реализация взаимодействия частей машины друг с другом, а также эффективность и гибкость ее работы. Подбор типа исполнительного устройства является сложной задачей, которая решается на этапе конструирования системы инженерами робототехниками и технологами.
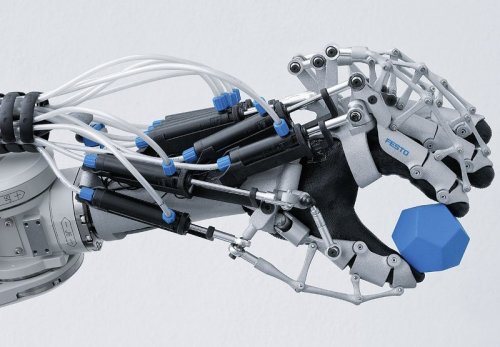
Один из популярных типов исполнительных устройств, применяемых в мехатронных системах — пневматическое исполнительное устройство. В качестве рабочего тела здесь используется газ, обычно это сжатый воздух, энергия которого и приводит механизм в движение. Вот почему пневматические исполнительные устройства отличаются дешевизной, надежностью, простотой настройки и управления, а также пожаробезопасностью. Затраты на приобретение и утилизацию рабочего тела (воздуха) отсутствуют.
Однако есть и некоторые недостатки, например возможно снижение рабочего давления из-за утечки в связи с плохой герметичностью трубок, что ведет к потерям мощности и скорости, а также усложнению позиционирования. Тем не менее, пневмомоторы, пневмоцилиндры и момнетальные пневмодвигатели находят сегодня достаточно широкое применение в роботах и мобильных машинах.
Давайте рассмотрим устройство типичного пневмопривода. Пневматический привод как таковой обязательно включает в себя компрессор и пневмодвигатель. В данном сочетании система способна осуществлять преобразование механической характеристики привода в соответствии с требованиями нагрузки.
Пневмоприводы поступательного движения бывают двухпозиционными, когда перемещение рабочего органа осуществляется между двумя крайними положениями, а также многопозиционными, когда перемещение происходит в различные положения.
По принципу действия пневмоприводы могут быть одностороннего действия (когда возврат в исходное положение обеспечивает пружина) или двухстороннего действия (возврат, как и рабочее движение, производятся сжатым воздухом). Пневмоприводы поступательного движения подразделяются главным образом на два типа: поршневые и мембранные.
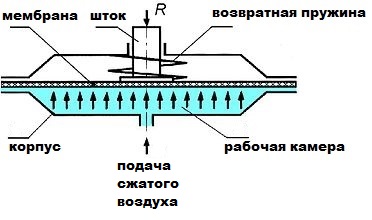
У поршневого пневмопривода в цилиндре под действием сжатого воздуха или пружины (обратный ход у привода одностороннего действия обеспечивается пружиной) перемещается поршень. У мембранного пневмопривода разделенная мембраной на две полости камера имеет с одной стороны давящий на мембрану сжатый воздух, а с другой стороны к мембране прикреплен шток, принимающий от мембраны продольное усилие. Так, пневмотический привод успешно находит применение в системах с цикловым управлением, например в манипуляторах с горизонтальным перемещением штока.
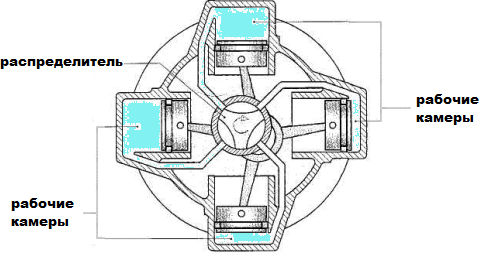
Функционально пневмопривод можно разделить на четыре блока: блок подготовки воздуха, блок распределения сжатого воздуха, блок исполнительных двигателей, и система передачи сжатого воздуха в исполнительные устройства.
В блоке подготовки воздуха воздух осушается и очищается от пыли. Распределительный блок по программе открывает или закрывает (при помощи клапанов) подачу сжатого воздуха в полости исполнительных двигателей.
Управление клапанами обычно производится с помощью электромагнитов или также пневматическим способом (если среда взрывоопасная). Блок исполнительных двигателей — это по сути цилиндры с поршнями, которые вращаются либо движутся прямолинейно — пневмоцилиндры, отличающиеся заданными перемещениями, усилиями и скоростями.
Каждый двигатель имеет свой рабочий цикл, причем последовательность циклов строго определена технологическим процессом и контролируется соответствующей программой системы управления роботом. Система передачи сжатого воздуха в разные устройства использует пневмоприводы с разным сечением, в соответствии с поставленной задачей.

В целом передача и преобразование энергии в пневмоприводе выглядит так. Главный приводной двигатель вращает компрессор, который сжимает воздух. Сжатый воздух затем подается через регулирующую аппаратуру в пневмодвигатель, где его энергия преобразуется в механическую (движение поршня, штока). После — рабочий газ выбрасывается в окружающую среду, то есть в компрессор он уже не возвращается.
Достоинства пневматических исполнительных устройств трудно переоценить. По сравнению с жидкостями, воздух более сжимаем, менее плотен и вязок, более текуч. Вязкость воздуха возрастает с увеличением давления и температуры.
Но поскольку воздух всегда содержит в небольшом количестве водяной пар и не имеет смазочных свойств, то имеется риск вредного влияния конденсата на рабочие поверхности камер. Поэтому пневматические приводы нуждаются в кондиционировании воздуха, то есть в предварительном придании ему таких свойств, чтобы продлить срок службы привода в котором он используется в качестве рабочего тела.
Если Вам понравилась эта статья, поделитесь ссылкой на неё в социальных сетях. Это сильно поможет развитию нашего сайта!
Источник
Введение. Понятия и определения. Обобщённая схема мехатронной системы. Классификация приводов мехатронных систем , страница 2
5) по регулируемой координате движения:
· позиционный привод (система)
6) электропривода по роду тока:
7) гидропривода по роду рабочей жидкости:
8) по виду устройства управления двигателя (усилителя мощности):
9) по основной схеме построения (закону управления):
привода программного управления (разомкнутого типа)
замкнутого типа (следящие – используют принцип управления по отклонению)
10) по схеме построения аналитической части привода встречаются несколько видов.
Виды приводов:
1) индивидуальный однодвигательный привод – привод, в котором одной координатой движения объекта управления управляет один исполнительный двигатель системы.
 |
Упрощённая схема:
2) индивидуальный многодвигательный привод – привод, в котором одной координатой движения одного объекта управления управляют несколько исполнительных двигателей.
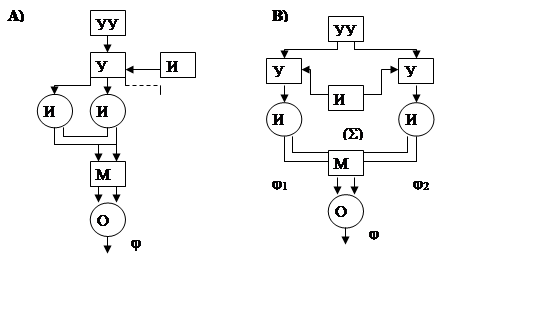 |
Упрощённая схема в двух вариантах:
МД – механический дифференциал (сумматор углов)
j1 и j2 – координаты первого и второго исполнительных двигателей

Если двигатели вращаются в разные стороны, то 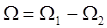
Вариант А) с двумя исполнительными двигателями выигрывает у варианта с одним исполнительным двигателем в плане компоновки (мощность ИД=ИД1+ ИД2, а ИД1 и ИД2 меньше по габаритам).
Вариант с двумя исполнительными двигателями может быть дороже, но по сущности выполняет туже задачу.
Одним из основных показателей приводов является диапазон регулирования – отношение максимально возможной скорости движения объекта к минимальной скорости плавного движения. ,
,
Где знаком «=» обозначается плавное движение.
Для хорошего качественного привода диапазон регулирования равен 1 или нескольким тысячам.
Характеристика трения на валу двигателя:
Почти во всех машинах есть обратная связь по скорости.
 |
При малых скоростях движение скачкообразное:
Схема В) позволяет сохранять моменты, но увеличить диапазон скоростей (увеличить максимальные скорости и уменьшить минимальную скорости)
3) групповой привод – привод, в котором одной координатой движения нескольких объектов управляет один двигатель.
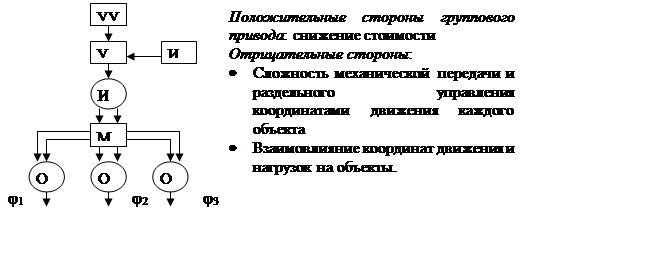 |
Упрощённая схема:
Такие схемы используются, например, в машиностроении (станок).
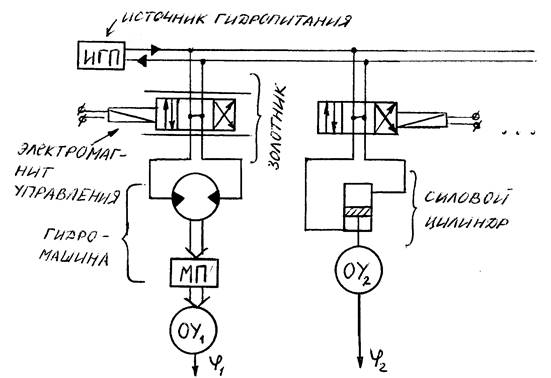
Существует несколько разновидностей группового привода, например, гидропривод с единой питающей установкой, упрощённая схема которого приведена ниже.
4) многокоординатный привод (система приводов) – привод, у которого несколькими координатами движения одного объекта управляют несколько приводов, которые взаимосвязаны. Получается более высокое качество, чем у приводов несвязанного управления.
Такой привод используется при управлении движением объекта со многими степенями свободы, например, привод горизонтального и вертикального наведения.
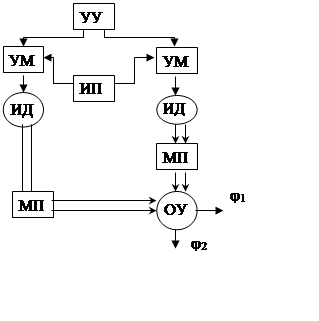 |
Упрощённая схема:
Устройство управления обеспечивает взаимосвязанное управление приводами.
Индивидуальный однодвигательный привод (ИОП).
Классификация элементов ИОП:
2) элементы вспомогательных подсистем.
Основные элементы в подсистеме решают основную задачу, для которой создавалась эта система.
Вспомогательные элементы обеспечивают работоспособность, включение, защиту и т. п. основных элементов системы.
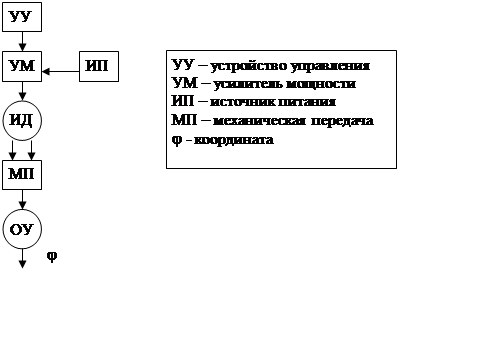
1) к основным элементам относятся:
· усилитель мощности или управляемый преобразователь энергии
Источник



