
Частотно-регулируемый электропривод насосных установок
 Режимы работы центробежных насосов энергетически наиболее эффективно регулировать путем изменения частоты вращения их рабочих колес. Частота вращения рабочих колес может быть изменена, если в качестве приводного двигателя используются регулируемый электропривод.
Режимы работы центробежных насосов энергетически наиболее эффективно регулировать путем изменения частоты вращения их рабочих колес. Частота вращения рабочих колес может быть изменена, если в качестве приводного двигателя используются регулируемый электропривод.
Устройство и характеристики газовых турбин и двигателей внутреннего сгорания таковы, что они могут обеспечить изменение частоты вращения в необходимом диапазоне.
Процесс регулирования частоты вращения любого механизма удобно анализировать с помощью механических характеристик агрегата.
Рассмотрим механические характеристики насосного агрегата, состоящего из насоса и электродвигателя. На рис. 1 представлены механические характеристики центробежного насоса, оборудованного обратным затвором (кривая 1) и электродвигателя с короткозамкнутым ротором (кривая 2).
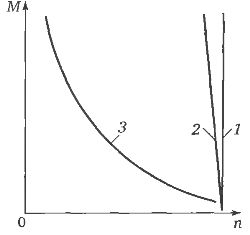
Рис. 1. Механические характеристики насосного агрегата
Разница значений вращающего момента электродвигателя и момента сопротивления насоса называется динамическим моментом. Если вращающий момент двигателя больше момента сопротивления насоса, динамический момент считается положительным, если меньше — отрицательным.
Под воздействием положительного динамического момента насосный агрегат начинает работать с ускорением, т.е. разгоняется. Если динамический момент отрицательный, насосный агрегат работает с замедлением, т.е. тормозится.
При равенстве этих моментов имеет место установившийся режим работы, т.е. насосный агрегат работает с постоянной частотой вращения. Эта частота вращения и соответствующий ей момент определяются пересечением механических характеристик электродвигателя и насоса (точка а на рис. 1).
Если в процессе регулирования тем или иным способом изменить механическую характеристику, например сделать ее более мягкой за счет введения дополнительного резистора в роторную цепь электродвигателя (кривая 3 на рис. 1), момент вращения электродвигателя станет меньше момента сопротивления.
Под воздействием отрицательного динамического момента насосный агрегат начинает работать с замедлением, т.е. тормозится до тех пор, пока вращающий момент и момент сопротивления опять не уравновесятся (точка б на рис. 1). Этой точке соответствует своя частота вращения и свое значение момента.
Таким образом, процесс регулирования частоты вращения насосного агрегата непрерывно сопровождается изменениями вращающего момента электродвигателя и момента сопротивления насоса.
Регулирование частоты вращения насоса может осуществляться или изменением частоты вращения электродвигателя, жестко соединенного с насосом, или изменением передаточного отношения трансмиссии, соединяющей насос с электродвигателем, который работает с постоянной скоростью.

Регулирование частоты вращения электродвигателей
В насосных установках используются преимущественно двигатели переменного тока. Частота вращения электродвигателя переменного тока зависит от частоты питающего тока f, числа пар полюсов р и скольжения s. Изменив один или несколько из этих параметров можно изменить частоту вращения электродвигателя и сочлененного с ним насоса.
Основным элементом частотного электропривода является частотный преобразователь. В преобразователе постоянная частота питающей сети f1 преобразуется в переменную f 2. Пропорционально частоте f 2 изменяется частота вращения электродвигателя, подключенного к выходу преобразователя.
С помощью частотного преобразователя практически неизменные сетевые параметры напряжение U1 и частота f1 преобразуются в изменяемые параметры U2 и f 2, требуемые для системы управления. Для обеспечения устойчивой работы электродвигателя, ограничения его перегрузки по току и магнитному потоку, поддержания высоких энергетических показателей в частотном преобразователе должно поддерживаться определенное соотношение между его входными и выходными параметрами, зависящее от вида механической характеристики насоса. Эти соотношения получаются из уравнения закона частотного регулирования.
Для насосов должно соблюдаться соотношение:
На рис. 2 представлены механические характеристики асинхронного электродвигателя при частотном регулировании. При уменьшении частоты f2 механическая характеристика не только меняет свое положение в координатах n — М, но несколько изменяет свою форму. В частности, снижается максимальный момент электродвигателя. Обусловлено это тем, что при соблюдении соотношения U1/f1 = U2/f2 = const и изменении частоты f1 не учитывается влияние активного сопротивления статора на величину вращающего момента двигателя.
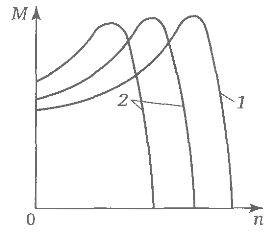
Рис. 2. Механические характеристики частотного электропривода при максимальных (1) и пониженных (2) частотах
При частотном регулировании с учетом этого влияния максимальный момент остается неизменным, форма механической характеристики сохраняется, меняется только ее положение.
Частотные преобразователи с широтно-импульсной модуляцией (ШИМ) имеют высокие энергетические характеристики за счет того, что на выходе преобразователя обеспечивается форма кривых тока и напряжения, приближающаяся к синусоидальной. В последнее время наибольшее распространение получили частотные преобразователи на IGBT-модулях (биполярных транзисторах с изолированным затвором).
IGBT-модуль является высокоэффективным ключевым элементом. Он обладает малым падением напряжения, высокой скоростью и малой мощностью переключения. Преобразователь частоты на IGBT-модулях с ШИМ и векторным алгоритмом управления асинхронным электродвигателем имеет преимущества по сравнению с другими типами преобразователей. Он характеризуется высоким значением коэффициента мощности во всем диапазоне изменения выходной частоты.
Принципиальная схема преобразователя представлена на рис. 3.
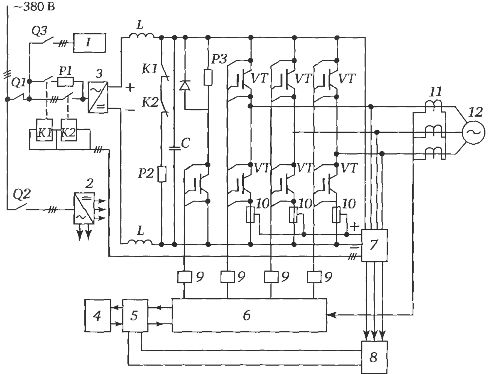
Рис. 3. Схема частотного преобразователя на IGBT-модулях: 1 — блок вентиляторов; 2 — источник питания; 3 — выпрямитель неуправляемый; 4 — панель управления; 5 — плата пульта управления; 6 — ШИМ; 7 — блок преобразования напряжения; 8 — плата системы регулирования; 9 — драйверы; 10 — предохранители блока инвертора; 11 — датчики тока; 12 — асинхронный короткозамкнутый двигатель; Q1, Q2, Q3 — выключатели силовой цепи, цепи управления и блока вентиляторов; K1, К2 — контакторы заряда конденсаторов и силовой цепи; С — блок конденсаторов; Rl, R2, R3 — резисторы ограничения тока заряда конденсаторов, разряда конденсаторов и узла слива; VT — силовые ключи инвертора (IGBT-модули)
На выходе частотного преобразователя формируется кривая напряжения (тока), несколько отличающаяся от синусоиды, содержащая высшие гармонические составляющие. Их наличие влечет за собой увеличение потерь в электродвигателе. По этой причине при работе электропривода на частотах вращения, близких к номинальной, происходит перегрузка электродвигателя.
При работе на пониженных частотах вращения ухудшаются условия охлаждения самовентилируемых электродвигателей, применяемых в приводе насосов. В обычном диапазоне регулирования насосных агрегатов (1:2 или 1:3) это ухудшение условий вентиляции компенсируется существенным снижением нагрузки за счет уменьшения подачи и напора насоса.
При работе на частотах, близких к номинальному значению (50 Гц), ухудшение условий охлаждения в сочетании с появлением гармоник высших порядков требует снижения допустимой механической мощности на 8 — 15%. Из-за этого максимальный момент электродвигателя снижается на 1 — 2%, его КПД — на 1 — 4%, cos φ — на 5 — 7%.
Во избежание перегрузки электродвигателя необходимо или ограничить верхнее значение его частоты вращения, или оснастить привод более мощным электродвигателем. Последняя мера обязательна тогда, когда предусматривается работа насосного агрегата с частотой f 2 > 50 Гц. Ограничение верхнего значения частоты вращения двигателя осуществляется ограничением частоты f 2 до 48 Гц. Увеличение номинальной мощности приводного электродвигателя осуществляется с округлением до ближайшего стандартного значения.

Групповое управление регулируемыми электроприводами агрегатов
Многие насосные установки состоят из нескольких агрегатов. Как правило, регулируемым электроприводом оборудуются не все агрегаты. Из двух-трех установленных агрегатов регулируемым электроприводом достаточно оснастить один. Если один преобразователь постоянно подключен к одному из агрегатов, имеет место неравномерное расходование их моторесурса, поскольку агрегат, оснащенный регулируемым приводом, используется в работе значительно большее время.
Для равномерного распределения нагрузки между всеми агрегатами, установленными на станции, разработаны станции группового управления, с помощью которых агрегаты могут поочередно подключаться к преобразователю. Станции управления изготавливаются обычно для низковольтных (380 В) агрегатов.
Обычно низковольтные станции управления предназначены для управления двумя-тремя агрегатами. В состав низковольтных станций управления входят автоматические выключатели, обеспечивающие защиту от межфазных коротких замыканий и замыканий на землю, тепловые реле для защиты агрегатов от перегрузки, а также аппаратура управления (ключи, кнопочные посты и пр.).
Схема коммутации станции управления содержит в своем составе необходимые блокировки, позволяющие произвести подключение преобразователя частоты к любому выбранному агрегату и осуществить замену работающих агрегатов без нарушения технологического режима работы насосной или воздуходувной установки.
Станции управления, как правило, наряду с силовыми элементами (автоматическими выключателями, контакторами и т.п.) содержат в своем составе управляющие и регулирующие устройства (микропроцессорные контроллеры и пр.).
По требованию заказчика станции комплектуются устройствами автоматического включения резервного питания (АВР), коммерческого учета потребляемой электроэнергии, управления запорной аппаратурой.
При необходимости в состав станции управления вводятся дополнительные аппараты, обеспечивающие использование наряду с частотным преобразователем устройства плавного пуска агрегатов.
Автоматизированные станции управления обеспечивают:
поддержание заданного значения технологического параметра (давления, уровня, температуры и др.);
контроль режимов работы электродвигателей регулируемых и нерегулируемых агрегатов (контроль потребляемого тока, мощности) и их защиту;
автоматическое включение в работу резервного агрегата при аварии основного;
переключение агрегатов непосредственно на сеть при выходе из строя частотного преобразователя;
автоматическое включение резервного (АВР) электрического ввода;
автоматическое повторное включение (АПВ) станции после пропажи и глубоких посадок напряжения в питающей электрической сети;
автоматическое изменение режима работы станции с остановкой и запуском агрегатов в работу в заданное время;
автоматическое включение в работу дополнительно нерегулируемого агрегата, если регулируемый агрегат, выйдя на номинальную частоту вращения, не обеспечивал требуемой подачи воды;
автоматическое чередование работающих агрегатов через заданные промежутки времени для обеспечения равномерного расходования моторесурса;
оперативное управление режимом работы насосной (воздуходувной) установки с панели управления или с диспетчерского пульта.
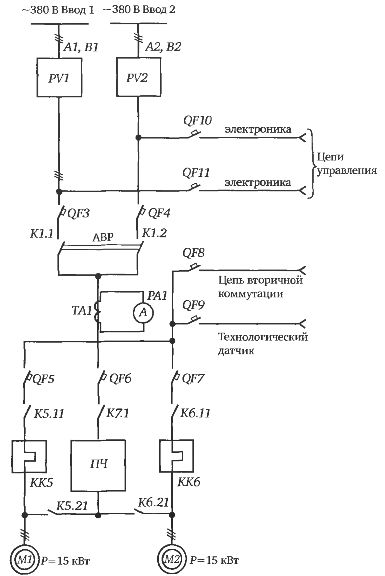
Рис. 4. Станция группового управления частотно-регулируемыми электроприводами насосов
Эффективность применения частотно-регулируемого электропривода в насосных установках
Применение частотно-регулиремого привода позволяет существенно экономить электроэнергию, т. к. дает возможность использовать крупные насосные агрегаты в режиме малых подач. Благодаря этому можно, увеличив единичную мощность агрегатов, уменьшить их общее число, и следовательно, уменьшить габаритные размеры зданий, упростить гидравлическую схему станции, уменьшить число трубопроводной арматуры.
Таким образом, применение регулируемого электропривода в насосных установках позволяет наряду с экономией электроэнергии и воды уменьшить число насосных агрегатов, упростить гидравлическую схему станции, уменьшить строительные объемы здания насосной станции. В связи с этим возникают вторичные экономические эффекты: уменьшаются расходы на отопление, освещение и ремонт здания, приведенные затраты в зависимости от назначения станций и других конкретных условий могут быть сокращены на 20 — 50%.
В технической документации на преобразователи частоты указывается, что применение регулируемого электропривода в насосных установках позволяет экономить до 50% энергии, расходуемой на перекачку чистых и сточных вод, а сроки окупаемости составляют три — девять месяцев.
Вместе с тем расчеты и анализ эффективности регулируемого электропривода в действующих насосных установках показывает, что в небольших насосных установках с агрегатами мощностью до 75 кВт, особенно тогда, когда они работают с большой статической составляющей напора, оказывается нецелесообразным применение регулируемых электроприводов. В этих случаях можно использовать более простые системы регулирования с применением дросселирования, изменения числа работающих насосных агрегатов.
Применение регулируемого электропривода в системах автоматизации насосных установок, с одной стороны, уменьшает потребление энергии, с другой — требует дополнительных капитальных затрат, поэтому целесообразность применения регулируемого электропривода в насосных установок определяется сравнением приведенных затрат двух вариантов: базового и нового. За новый вариант принимается насосная установка, оснащенная регулируемым электроприводом, а за базовый — установка, агрегаты которой работают с постоянной частотой вращения.
Если Вам понравилась эта статья, поделитесь ссылкой на неё в социальных сетях. Это сильно поможет развитию нашего сайта!
Подписывайтесь на наш канал в Telegram!
Просто пройдите по ссылке и подключитесь к каналу.
Не пропустите обновления, подпишитесь на наши соцсети:
Источник
Статьи
Тематика: Полезная информация

Частотно регулируемый привод (ЧРП)
Общие сведения
Частотно регулируемым приводом (ЧРП) называют агрегат, осуществляющий бесступенчатое регулирование скорости вращения ротора электродвигателя, путем изменения частоты питающего напряжения. ЧРП включает в себя электродвигатель и преобразователь частоты (ПЧ).
Частотный электропривод используется во многих сферах нашей жизни. Управление электродвигателями, построенное на этом принципе, лежит в основе самых разнообразных устройств, начиная с бытовой техники (стиральные машины, пылесосы), заканчивая крупными технологическими комплексами различных отраслей промышленности.
Компания Овердрайв-Электро предлагает частотоно регулируемые приводы ABB со склада в Минске:
Устройство и принцип действия
Принцип, на основе которого функционирует частотный привод, использует базовое свойство вращающихся электрических машин, выраженное зависимостью параметров электромагнитного поля статора от частоты напряжения. Так, угловая скорость электромагнитного поля статора асинхронного двигателя выражается формулой:
где f1 — частота напряжения питания, р – число пар полюсов обмотки статора. Следовательно, осуществляя изменение частоты подаваемого напряжения, можно плавно регулировать угловую скорость вращающегося поля статора, а значит и частоту вращения ротора двигателя.
Структурная схема, представленная на рис.1 показывает, как устроен преобразователь частоты (ПЧ), работающий в составе ЧРЭП (ЧРЭП — частотно регулируемый электропривод).

Рис. 1. Схема частотного регулирования
Переменное сетевое напряжение Ucпромышленной частоты fc выпрямляется диодным мостом (В) и после LC – фильтра, сглаживающего пульсации, поступает на вход инвертора (И), который является ключевым узлом всего привода.
Простой Г – образный LC – фильтр представляет собой комбинацию индуктивности (дросселя) и ёмкости (конденсатора), которые включены соответственно последовательно и параллельно нагрузке выпрямителя. Выпрямленное напряжение, кроме постоянной составляющей, содержит также переменную, имеющую вид однонаправленных пульсаций с некоторой амплитудой. Наличие высокочастотных составляющих, обусловленных пульсациями, негативно сказывается на работе электроники, поэтому частотно регулируемые электроприводы (ЧРЭП), как правило, оборудуются фильтрами подобного рода. Работает фильтр следующим образом. Индуктивность, включенная последовательно с нагрузкой, беспрепятственно пропускает постоянную составляющую тока, оказывая ей лишь незначительное активное сопротивление проводов катушки. Переменная же составляющая тока испытывает индуктивное сопротивление дросселя. При этом, в полупериод нарастания тока, дроссель индуцирует ЭДС противоположного направления. В это время происходит намагничивание сердечника, то есть накопление энергии. В этот же полупериод происходит заряд конденсатора фильтра. В полупериоде спада тока, запасенная дросселем энергия высвобождается, препятствуя его уменьшению, а конденсатор разряжается на нагрузку, также поддерживая величину тока. В результате этого происходит значительное сглаживание переменной составляющей.
Инвертор формирует на выходе переменное напряжение с изменяемой частотой и амплитудой. Основу схемы инвертора составляют силовые электронные ключи, функции которых выполняют транзисторы, изготовленные по IGBT – технологии. Для управления ключами используется принцип широтно–импульсной модуляции (ШИМ). Управляющие сигналы формирует система импульсно – фазового управления.
Процесс регулирования привода может осуществляться либо вручную, путем установки задания оператором, либо в автоматическом режиме.
Эффективность применения ЧРП в различных областях
Экономический эффект от применения частотного регулирования хорошо иллюстрируется на примере насосных станций городской системы водоснабжения. Работа данных систем характеризуется необходимостью поддержания определенного давления в водоводе, которое функционально связано с изменяющимся во времени потреблением воды. До появления систем управления, использующих частотный привод, регулирование давления осуществлялось количеством одновременно находящихся в работе насосных агрегатов, а также положением задвижек, то есть, дросселированием.
На рисунке 2 представлен график сравнительного потребления мощности при использовании дросселирования и частотного регулирования.
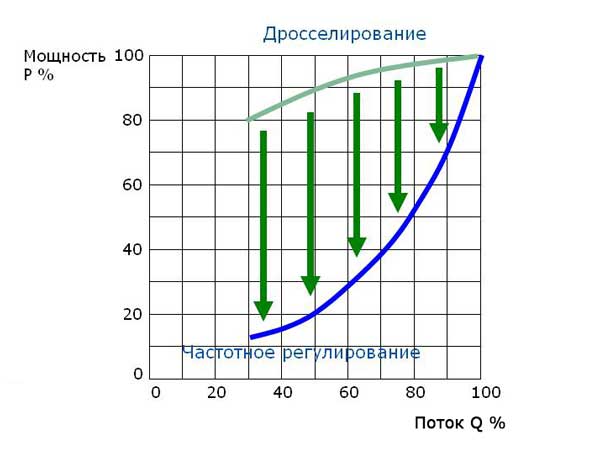
Рисунок 2. Потребление мощности при использовании дросселирования и частотного регулирования.
Точка пересечения графиков, в которой значения мощности и потока достигают 100%, соответствует полностью открытой задвижке (при регулировании дросселированием) и работе агрегата на полную мощность (при частотном регулировании). В этом режиме применение ЧРП не приносит экономического эффекта. Но при дросселировании, когда задвижка открыта лишь частично, потребляемая электродвигателем мощность в несколько раз больше, чем в варианте с применением частотного регулирования и полностью открытой задвижкой. При этом, разница в потреблении тем больше, чем меньше требуемая производительность агрегата. Это обусловливает существенную экономию электрической энергии при внедрении ЧРП, так как режим ограничения подачи имеет большой удельный вес в графике работы насосов (например, в ночное время при практическом отсутствии потребления).
В некоторых случаях, необходимость плавного регулирования угловой скорости валов механизмов диктуется самой технологией. Например, мощность котлов и энергоблоков тепловых станций регулируется плавным изменением производительности механизмов подачи топлива. На ГРЭС и ТЭЦ, работающих на угле, последний, перед подачей в топку котла, измельчается в мельницах до пылевидного состояния. Подачу угольной пыли в топку выполняет ППЛ (питатель пыли лопастный). Привод этого механизма традиционно осуществляется двигателем постоянного тока с регулируемыми оборотами. Регулирование производится посредством тиристорного блока управления. Электродвигатели постоянного тока имеют целый ряд эксплуатационных недостатков. Они дороги, щеточный механизм этих электрических машин подвержен быстрому износу, весьма чувствителен к загрязнениям и нуждается в периодической регулировке и чистке.
Кроме применения двигателей постоянного тока, функция бесступенчатого регулирования реализуется с помощью механических вариаторов, например, в крупных станочных приводах. Применение механических коробок передач всегда сопровождается существенными потерями, к тому же, такие системы обладают ограниченным диапазоном регулирования.
Использование частотного привода, укомплектованного асинхронным двигателем, имеющим короткозамкнутый ротор, позволяет избавиться от перечисленных недостатков двигателей постоянного тока и механических систем регулирования. Следует особо подчеркнуть, что наибольшую выгоду приносит применение именно электродвигателей с короткозамкнутым ротором. Эти машины наиболее дешевы, конструктивно просты, не имеют щеточного аппарата и могут быть приспособлены для работы в самых тяжелых условиях.
Внедрение систем управления, использующих частотно регулируемый привод, является инновационным мероприятием и, как правило, быстро окупается.
Для консультации или заказа частотно регулируемых приводов воспользуйтесь формой обратной связи на странице контактов.
Источник



